A detachable robotic hand capable of crawling and grabbing objects has been developed by a team of scientists from the Swiss Federal Institute of Technology in Lausanne (EPFL).
According to its developers, the design of the detachable robotic hand allows for the completion of tasks such as retrieving objects beyond normal reach and performing multi-object handling.
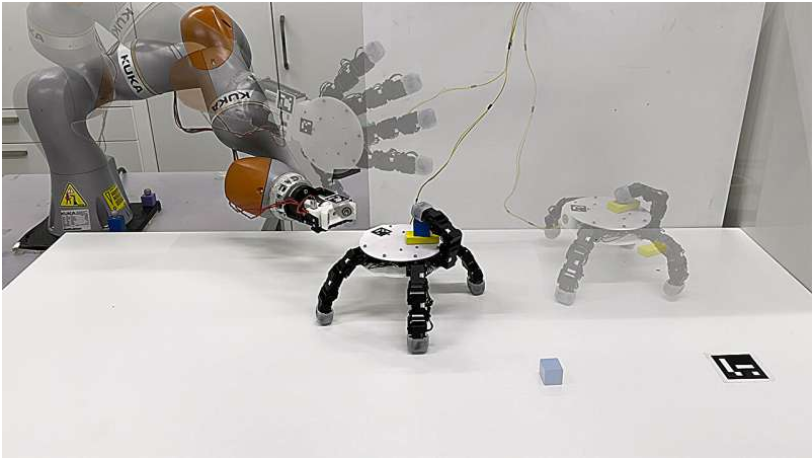 Source: Xiao Gao
Source: Xiao Gao
While the majority of currently available robotic hands are designed to mirror the highly dexterous human hand, their asymmetric structure — which enables grasping from one side only — and limited reach can constrain the robotic hand’s capabilities in certain tasks, like grasping many objects simultaneously or accessing confined spaces.
As such, the EPFL team developed two versions of their robotic hand — a five-fingered design and a six-fingered design, which feature a 16 cm in diameter palm. Each of the designs feature symmetrical architecture, which enables grasping from both sides, the team reported. Additionally, the hand in both designs can detach from the arm-mounted base to crawl.
During trials, the team demonstrated that the robotic hand could retrieve up to three objects sequentially and then re-attach to its arm-mounted base while securing its grasp on objects, including a cardboard tube, a rubber ball, a whiteboard marker and a tin can. Further, the robotic hand can also mimic 33 human grasp types and hold objects weighing up to 2 kg.
The team suggests that the detachable robotic hand offers potential applications in industrial, service and exploratory robotics.
An article detailing the technology, “A detachable crawling robotic hand,” appears in the journal Nature Communications.
