A team of researchers from Massachusetts Institute of Technology (MIT) has developed an aerial microrobot that can fly with speed and agility that is comparable to flying insects.
According to its developers, the new robot features flapping wings that are powered by a set of artificial muscles that enable the robot to flap its wings at an extremely fast rate. A two-step, artificial intelligence (AI)-driven control scheme allows for complex, rapid maneuvers, and the computational efficiency needed for real-time deployment. This two-part control scheme enabled the robot's speed and acceleration to increase by roughly 450% and 250%, respectively, its developers noted.
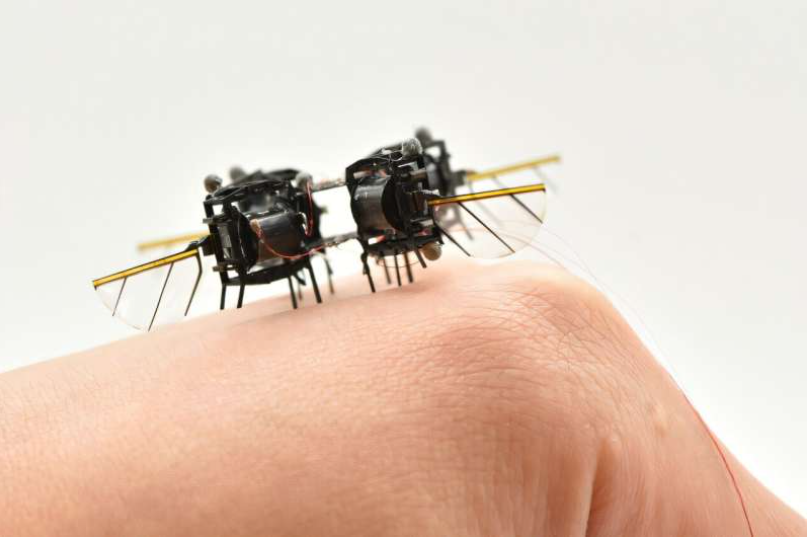 Source: MIT Soft and Micro Robotics Laboratory
Source: MIT Soft and Micro Robotics Laboratory
The team built the model-predictive controller, which uses a dynamic, mathematical model, to predict the behavior of the robot and plan the ideal series of actions to safely follow a trajectory. Likewise, it can plan maneuvers such as aerial somersaults, rapid turns and aggressive body tilting.
The AI-driven flight control system for insect-scale robots was developed using imitation learning, which compresses a high-performance controller into a fast, efficient policy. This approach enabled the flying robot to perform aggressive maneuvers — flying 447% faster, accelerating 255% more and completing 10 flips in 11 seconds — while staying within centimeters of its intended trajectory. The system also mimics insect-like behaviors, such as saccade movements, and lays the groundwork for future onboard sensors and autonomous navigation.
The work shows that microrobots can achieve high agility despite fabrication uncertainties, wind disturbances and tether constraints, marking a potential paradigm shift for micro-robotics control architectures.
"We want to be able to use these robots in scenarios that more traditional quad copter robots would have trouble flying into, but that insects could navigate. Now, with our bioinspired control framework, the flight performance of our robot is comparable to insects in terms of speed, acceleration, and the pitching angle. This is quite an exciting step toward that future goal," the researchers noted.
The robot's developers suggest that they could potentially be used in the future to aid in the search for survivors trapped beneath the rubble following an earthquake, flitting through tight spaces larger robots cannot reach, while also avoiding stationary obstacles and pieces of falling rubble.
An article detailing the team’s work, “Aerobatic maneuvers in insect-scale flapping-wing aerial robots via deep-learned robust tube model predictive control,” appears in the journal Science Advances.
For more on the flying robot, watch the accompanying video that appears courtesy of Science Advances.
