A team of researchers from Massachusetts Institute of Technology (MIT) has created a hopping robot capable of leaping over tall obstacles and jumping across slanted or uneven surfaces, while using significantly less — an estimated 60% less — energy than an aerial robot.
Smaller than a human thumb and weighing less than a paperclip, the so-called hopping robot features a springy leg that helps to propel it off the ground. The robot also features four flapping-wing modules that give it lift and control its orientation.
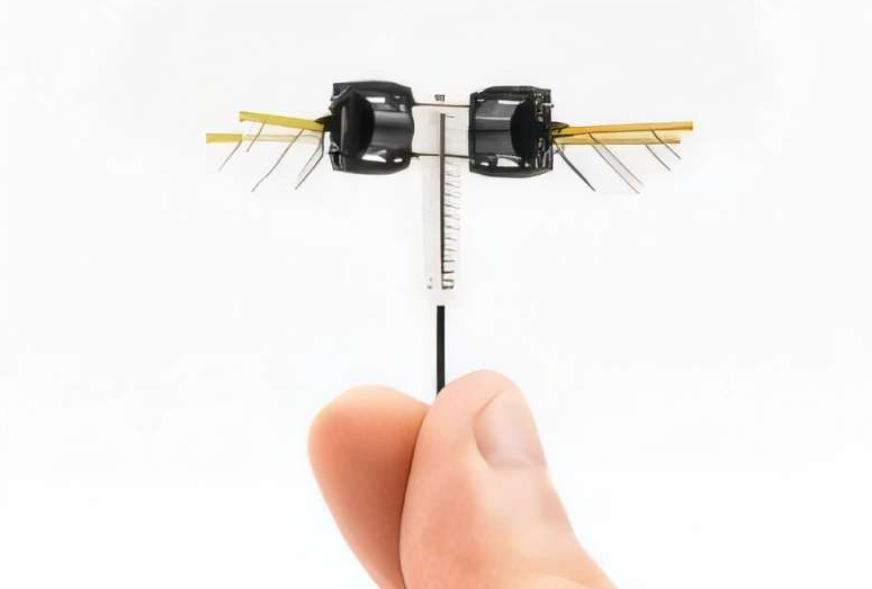 Source: MIT
Source: MIT
According to its developers, the robot can jump about 20 cm into the air — or four times its height — at a lateral speed of roughly 30 cm per second. Further, the hopping robot can hop across ice, wet surfaces and uneven soil, and even onto a hovering drone.
Thanks to the robot’s light weight and durability, it can reportedly carry about 10 times more payload than a similar-sized aerial robot.
The MIT team outfitted the robot with an elastic leg made from a compression spring that converts the robot's downward velocity to upward velocity when it strikes the ground.
"If you have an ideal spring, your robot can just hop along without losing any energy. But since our spring is not quite ideal, we use the flapping modules to compensate for the small amount of energy it loses when it makes contact with the ground," the researchers explained.
Further, once the robot bounces back up into the air, the flapping wings offer lift, thus ensuring that the robot remains upright and has the correct orientation for its next jump. Meanwhile, the robot’s four flapping-wing mechanisms are powered by soft actuators (or artificial muscles) that can endure repeated impacts with the ground without being damaged.
Additionally, the robot features a fast control mechanism that determines how the robot should be oriented for its next jump. An external motion-tracking system is used for sensing while an observer algorithm computes the control information using sensor measurements., the researchers noted.
The robot follows a ballistic trajectory as it hops and arcs through the air. When it reaches the peak of that trajectory, it reportedly estimates its landing position. Based on that information, the controller can then calculate the appropriate takeoff velocity for the next jump. When aloft, the robot flaps its wings to adjust its orientation, enabling it to hit the ground with the correct angle and axis to move in the correct direction and at the correct speed.
Due to its design, the robot successfully traversed a variety of surfaces — grass, ice, wet glass and uneven soil — and it even hopped on a dynamically tilting surface. Likewise, the robot could also hop onto an airborne drone without damaging either device.
An article detailing the robot, “Hybrid locomotion at the insect scale — combined flying and jumping for enhanced efficiency and versatility,” appears in the journal Science Advances.
