One such project is Harvard University’s "RoboBees,” which aims to create autonomous robotic insects capable of sustained, independent flight.
Robots with these capabilities could one day assist in reconnaissance missions, aid in remote communication and act as artificial pollinators.
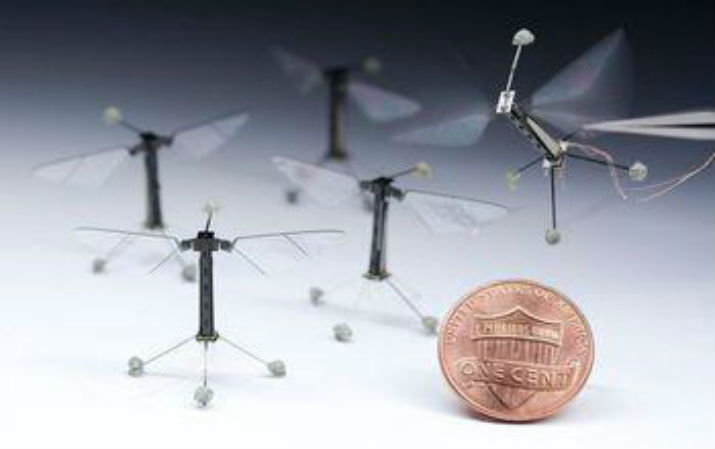 Inspired by the biology of a fly, with submillimeter-scale anatomy and two wafer-thin wings that flap almost invisibly 120 times per second, the Robobee takes its first controlled flight. (Image Credit: Kevin Ma and Pakpong Chirarattananon)
Inspired by the biology of a fly, with submillimeter-scale anatomy and two wafer-thin wings that flap almost invisibly 120 times per second, the Robobee takes its first controlled flight. (Image Credit: Kevin Ma and Pakpong Chirarattananon)
The researchers, led by Robert Wood, Professor of Engineering and Applied Sciences at Harvard University, have designed sophisticated, tiny robots with features that will soon enable autonomous flying.
In order to get this far, the team had to advance basic research such as micro-manufacturing methods and materials for actuation, to small-scale energy storage and algorithms to control individuals and coordinated swarms of robots.
In doing so, the team created new methods for manufacturing millimeter-scale devices based on lamination and folding, new sensors for mobile computing, and low-power applications coordination algorithms for swarms of hundreds to thousands of robots working together.
The team was inspired by an insect’s ability to self-launch, navigate and perform swift tasks, despite their small bodies.
"Bees and other social insects provide a fascinating model for engineered systems that can maneuver in unstructured environments, sense their surroundings, communicate and perform complex tasks as a collective full of relatively simple individuals," said Wood. "The RoboBees project grew out of this inspiration and has developed solutions to numerous fundamental challenges—challenges that are motivated by the small scale of the individual and large scale of the collective."
RoboBee
The team’s current RoboBee weighs in at just 84 milligrams, which is about the same size as a real bee (maybe even lighter).
While developing the robot, the team equipped it with some new capabilities, such as the ability to swim. Now the researchers are even working on RoboBees that can sense their environments using lasers.
Last month the team revealed that its RoboBee could even perch during flight to save energy, just like bats, birds and butterflies do.
"The use of adhesives that are controllable without complex physical mechanisms, are low power, and can adhere to a large array of surfaces is perfect for robots that are agile yet have limited payload—like the RoboBee," said Wood. "When making robots the size of insects, simplicity and low power are always key constraints."
The RoboBee research won’t stop now, though.
The team is currently working to make the perching mechanism omnidirectional, so the robot can land anywhere. It is also developing onboard power sources that could allow RoboBees to fly untethered.
According to Wood, it will take another five to 10 years before RoboBee will be ready for real-word applications.
"Aerial micro-robots have enormous potential for large-scale sensor deployment to inaccessible, expansive and dangerous locations. However, flight is energy-intensive, and the limitations of current energy storage technologies severely curtail in-air operations," said Jordan Berg, an NSF program director familiar with the project. "Because the capabilities of flying insects far exceed those of similarly sized machines, many researchers seek design inspiration from nature. NSF-funded projects such as this one show that innovative solutions can arise from exploiting a synergy between biological ends and engineered means."
