Dan Franklin is an electrical engineer with over 20 years of industry experience. After working as an engineer for Energizer batteries, he spent time designing medical electronics and equipment. A long-time tinkerer, Dan has been building, designing and fixing things since he was a kid. Amongst many other tools, Dan owns a 3-D printer that he uses to design parts. Here Dan opens up his brand new Ciclop 3-D Scanner kit and documents his first time using the product. Here's how it went.
I recently bought a Ciclop 3-D scanner kit. 3-D scanners can range in price from free to $75,000 and beyond. Although this scanner is definitely on the inexpensive side, it’s got some surprising benefits and features for entry level. This scanner is an open source design from BQ Labs and you can print all the plastic parts and buy the other parts to make it.

This design was chosen mostly because of cost and functionality. The other options in my price range were to use 123D Catch, which requires only a camera and Internet connection. This approach does work, but it is very time consuming to take pictures and then process the results. Another option explored was a Kinect sensor in conjunction with software such as ReconstructMe or Skanect. This option also works but only on large objects and not so well for small objects.
Price: The parts for the Ciclop scanner would cost around $100 if purchased individually. A company selling an HE3D labeled Ciclop scanner was advertised for $130, including shipping, so that is what was ordered as the simpler option.
Function: The Ciclop scanner uses an Arduino board with a shield board that drives a stepper motor to turn a platform on which you place the part to be scanned. Two line lasers also driven by the board shine on the object and a webcam processes the results to create the 3-D point cloud. It uses software called Horus that is specifically for this scanner. While the expected results wouldn’t be perfect, one thing about this design is the community that exists due to its open source nature. I find that my purchases of equipment are often influenced by the support community that exists around them. In other cases I have purchased equipment that was less functional simply because a community and improvements have already been devised.
What’s in the Box: The Ciclop scanner kit arrived in a box after about a week from when it was ordered. It was nicely packed with each part in its own foam cutout. A colleague and I assembled the kit in about an hour and it was a fairly simple build. We had watched a video of the assembly process which helped, but the kit from HE3D was not quite the same as the open source design. The kit did not come with any instructions to help but it didn’t take too much work to figure out how it went together. The main differences from the open source design were how the threaded rod connected to the plastic and the lack of an opening to access the electronics.


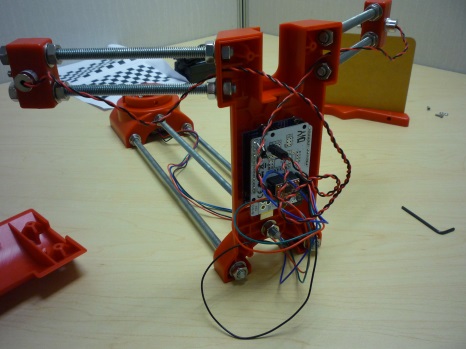


Post-Assembly: Once the kit was assembled we connected it to a computer and installed the Horus software and the computer found and installed the webcam drivers. Upon booting the software it detected the scanner and webcam. One obvious problem right from the start was that the video from the camera was very out of focus. You can easily find instructions on how to manually adjust the focus—doing this helped a lot. The first part is to run the calibration wizard which utilizes a checkerboard pattern that you put on the scanner platform. It took some fiddling to realize that the camera settings had to be adjusted for it to recognize the pattern. When the scanner can see the calibration pattern it overlays colored lines on it. After the camera was adjusted the calibration wizard moves the platform around, turns the lasers on a few times, asks you to set some preferences and then you’re ready to go.
A Terrible Collision: For my first scan my colleague brought a toy car from his desk. It wasn’t the most ideal object to scan since it has clear windows, shiny parts and black wheels, which could all cause issues. Since this scanner is optical based it has trouble with black as the laser light is absorbed, shiny surfaces cause reflections, and clear can likewise confuse it. It was still a decent object to scan since it has lots of surface features.
The first scan started and the results began appearing on the screen, although they were confusing to say the least. You couldn’t really tell at first but as more of the scan completed it looked more like a car accident than a car. You can see some of the pictures of what my scan looked like. On one hand the results were encouraging because parts of it looked like the car, but on the other hand something was seriously wrong!

Resolving the Issue: Reviewing the online documentation on the assembly and calibration didn’t really offer any clues as to what was wrong. The forums did yield a discussion on ghost images with a number of solutions and suggestions. The most common one has to do with laser alignment and calibration and also the platform calibration. HE3D used a clear acrylic platform and the edge of this would have a lot of reflection. The surface came with protective paper on it which was left on so it wouldn’t cause issues. Making the platform black to reduce any reflection it may be causing was a first attempt at improvement. Simply using a black permanent marker to color the surface and sides black took care of this. I ended up putting tape on the side because it was still reflective without it. Trying my scan again and the results were the same. Next on the trouble shooting was careful alignment of the lasers. The goal was to have the laser lines form an X with the point at the center of rotation of the platform. The lines from the lasers also need to be perpendicular to the platform. It took a little adjusting to get this to all line up, small changes of the surface the scanner is on also make a difference. Once it was all aligned the calibration was run again and another scan run, unfortunately the results were similar.

I looked for other solutions on the forum and one person had the problem where the stepper motor that rotates the platform had a different step resolution. The firmware default is 1.8° per step; this was checked but the motor matched the firmware default.
One thing that I tried was turning off one of the lasers and surprisingly that worked, but I wasn’t sure why. After reading more of the forum, one more solution was to check a box to reverse the motor direction. After reversing the motor low and behold it worked! I now was able to use both lasers and get a scan of a car instead of a car accident.
I chalk this up to a lack of directions. This stepper motor is a 4 wire motor and if you reverse the orientation of the plug it reverses the motor direction. Since no directions were provided on which way to plug it in I guessed. The software has the option to reverse it but simply reversing the plug makes it so it will work with the defaults.
The results of the scan are less than perfect and I believe they can be improved by playing with various settings learned about while trying to solve the initial problem. Even with a less than perfect scan, it is good enough to be able to clean it up, but a better object and better settings should yield better results.


While it was annoying to troubleshoot the scanner I learned a lot along the way and now can work on getting better scans. Hopefully the software will get better over time with the support of the community. Either way it should be a fun and hopefully useful new toy.

