A fleet of cooperative robots that function much like ants has been developed by a team of researchers from the Harvard John A. Paulson School of Engineering and Applied Sciences (SEAS) and Faculty of Arts and Sciences.
Taking inspiration from ants who collectively build vast, intricate, climate-controlled structures — despite not possessing a blueprint or guidance from a worksite foreman — the team has reportedly built this fleet of cooperative robots that can spontaneously organize to build and dismantle structures, guided only by environmental cues and minimal physical rules.
 Source: Harvard John A. Paulson School of Engineering and Applied Sciences
Source: Harvard John A. Paulson School of Engineering and Applied Sciences
Specifically, the team sought to mimic ants' excavation and escape capabilities using these robots.
"Our new study shows how simple, local rules can lead to the emergence of complex task completion that is self-organized and thus robust and adaptive,” the researchers explained. "We also introduce the concept of 'exbodied intelligence," where collective cognition arises not solely from individual agents, but from their ongoing interaction with an evolving environment."
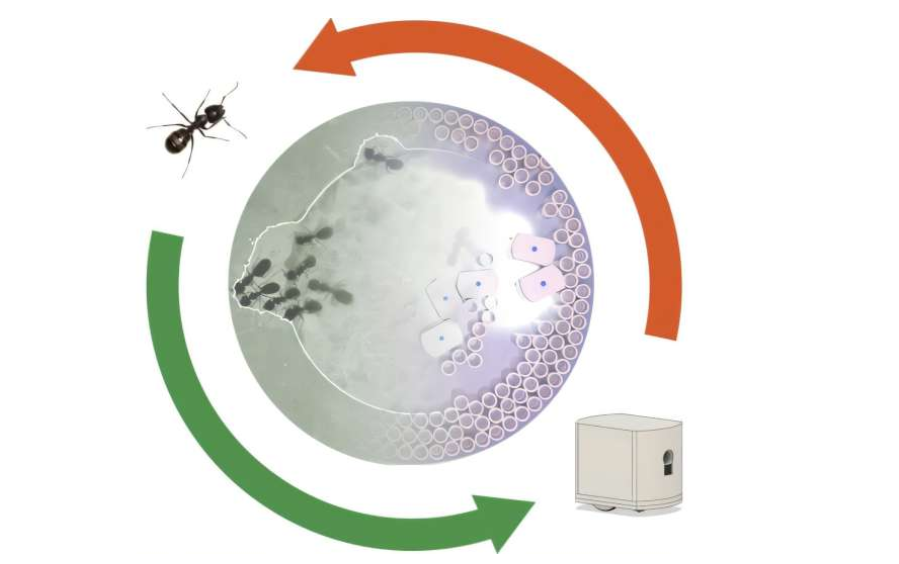
The team enhanced the swarm robotics platform to both excavate and build, taking inspiration from insect stigmergy. Their “RAnts” rely on light-based “photormones” to coordinate, following simple rules — specifically, track signal gradients, move materials and deposit at thresholds. These interactions reportedly form feedback loops that encourage complex behaviors like clustering and structure formation via trapping instability. By tuning cooperation strength and deposition rate, the robot swarm can alternate between construction and deconstruction.
The team suggests that their work could potentially lead to applications ranging from autonomous construction in hazardous environments, to planetary exploration or experimental models for studying animal behavior.
An article detailing the work, “Obotectonics: Emergent Phototactic Aggregation-Disaggregation in Swarms,” appears in the journal PRX Life.
