A team of researchers from Guangdong University of Technology and Guangdong Polytechnic Normal University in China has developed amphibious soft robots designed for diverse environments.
Taking inspiration from ants and whirligig beetles and how they move, the tiny robot swarms show promise in disaster response, environmental monitoring and medical procedures.
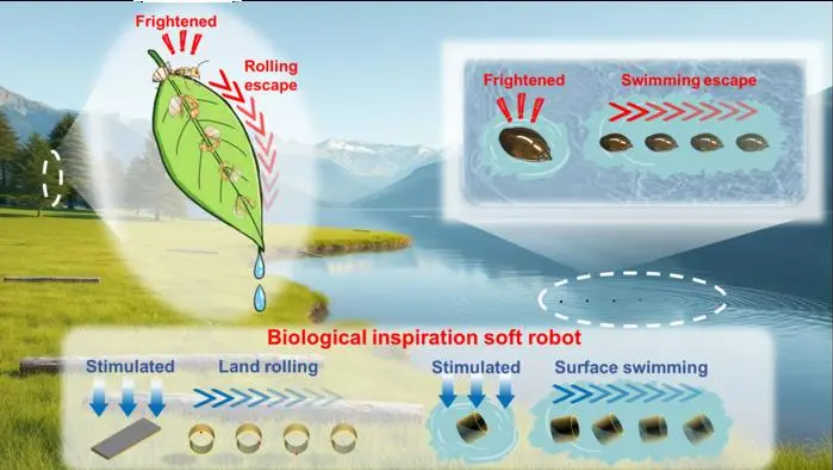 Simulating ant escape and whirligig beetle motion. Source: Guo Yuanhui and Chen Yun
Simulating ant escape and whirligig beetle motion. Source: Guo Yuanhui and Chen Yun
The team sought to create soft robots that sense and react to several environmental signals simultaneously, which led to the creation of a multi-layered composite film, functioning as an advanced “artificial muscle.”
According to the developers, the new design keeps the robot’s assorted responses separate, solving the interference problem plaguing current soft robots.
To create the soft robot, which weighs roughly 8 milligrams, the team used a common polyimide (PI) film that was chemically modified to form a layer of polyamic acid (PAA) that is highly responsive to alterations in temperature and humidity.
A separate silicone rubber layer, infused with neodymium iron boron (NdFeB) magnetic particles, was bonded to the PI-PAA film. This “triple-layer sandwich” construction offers a so-called trifecta of responses: temperature, humidity and magnetic fields.
On the surface of water, the robot can achieve speeds of up to 9.6 cm/s — which is a “performance comparable to actual whirligig beetles.”
The robot is able to master various terrains — like climbing slopes or transitioning between water and dry land — because it uses a strong rolling gait when steered by a rotating magnetic field.
The developers reported that the robot is strong enough to carry a payload 2.5 times its body weight. During trials, the robot transported a small pebble across challenging terrain, moving back and forth between water to land.
In response to a short pulse of near-infrared light, the robot released the pebble. Further, the light produced heat triggered a shape change that forced the robot to unfold. The robot then returned to its original shape and retreated under magnetic guidance, thus completing the entire cycle of pick-up, transport and delivery.
The team envisions that these robots could be deployed in environments considered too dangerous or inaccessible for humans or conventional robots. They suggest that the robots could potentially be used in the future to check submerged structures, track wetland pollution and assist in disaster relief efforts, for instance.
