A paper-thin, flexible robotic actuator that was inspired by human muscle proteins has been developed by a research team from Pohang University of Science and Technology (POSTECH).
Although it is as thin as a piece of paper, the actuator is capable of producing strong forces, enabling a robot to maneuver through tight spaces and to manipulate objects. This, according to the researchers, makes it ideal for a range of applications from surgical robots to industrial equipment.
 Source: POSTECH
Source: POSTECH
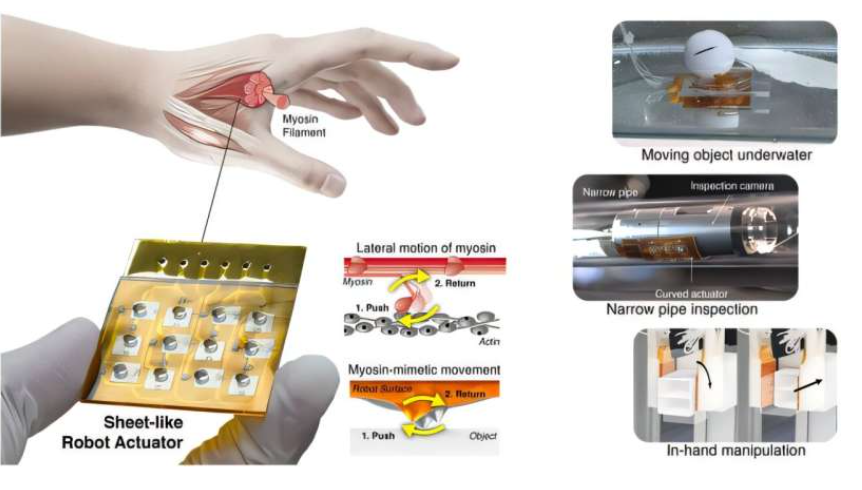
While most conventional robots are created with rigid metal components, which gives them strength, it limits their ability to perform delicate motions or operate in confined environments. As such, the team took inspiration from the human muscle, mimicking the function of myosin, which is a protein in muscle that produces large movements via repeated small contractions, to develop the thin, sheet-shaped pneumatic actuator.
While the actuator appears to be a simple sheet, it features dozens of small air chambers and multi-layered, multi-channel air pathways.
The team explained that when air is sequentially pumped into the sheet, the surface of the protrusions undulates in multiple directions, gradually gathering small forces to create larger movements. Even when bent, the actuator crawls like a caterpillar using only those protrusions. The team added that the surface can move in six different directions — up, down, left, right and rotation — and enables flexible control over speed and distance.
When the team performed manipulation tests on the robot, it moved with precision much like human fingers, and it also completed tasks involving moving objects underwater.
The team determined that the robots outfitted with such an actuator could one day handle tasks like cleaning narrow pipelines, which are difficult for conventional robots, assisting with precision surgeries by navigating through small openings or performing tasks such as inspections in confined spaces. Likewise, the technology might be applied to home cleaning and caregiving robots.
The article detailing the team's work, “Soft and flexible robot skin actuator using multilayer 3D pneumatic network,” appears in the journal Nature Communications.
