You can breathe a small sigh of relief: We’re still at a place where living, breathing creatures can do things that robots simply can’t. But more and more, technology is closing that gap. Here’s but one of the latest innovations: six-legged robots designed to rival the abilities of many natural species to traverse irregular terrains — and adapt to their environs.
A study by an international team, led by researchers at Toyko Institute of Technology, has focused on driving multi-legged robots — specifically, with a proposed controller that employs a network of non-linear oscillators to enable diverse gaits and postures. The study also has inspired new research into the control of multi-legged robots, including the potential for brain-computer interfaces in the future.
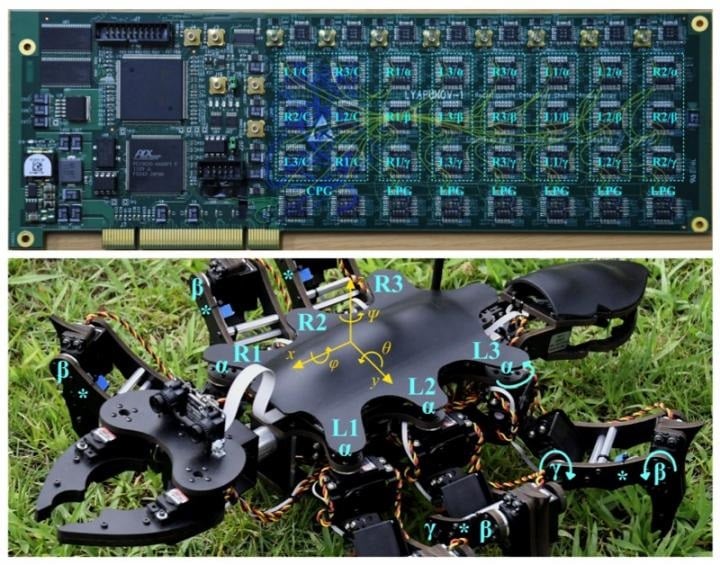 Top, circuit board implementing the controller; bottom, the robot. Source: IEEE Access.Circuit Pattern Generators
Top, circuit board implementing the controller; bottom, the robot. Source: IEEE Access.Circuit Pattern Generators
One thing we know about creatures’ ability to walk: Even the simplest brains contain pattern-generator circuits, which are networked to autonomously generate rhythmic gait patterns through a sequence of leg movements. This network is known as a central pattern generator, or CPG. Attempts to replicate such circuits artificially have so far had limited success, however, due to poor flexibility.
But the researchers’ new approach shows promise. It employs a hierarchical network of electronic oscillators, arranged over two levels to mimic the way the circuits work in the natural world. At the top level is a CPG, responsible for controlling the overall sequence of leg movements (gait). At the lower level are six local pattern generators (LPGs), responsible for controlling the trajectories of the individual leg joints.
While previous attempts to condense so much complexity into artificial pattern generators have proved challenging, the proposed controller possesses an extremely high level of versatility thanks to field-programmable analog arrays (FPAA) — integrated circuits containing analog blocks that can be reconfigured under digital control. As a result, circuit parameters can undergo "on-the-fly” reconfiguration and tuning, along with a certain degree of self-organization. The design is based on years of previous research on non-linear and chaotic electronic networks that has successfully replicated phenomena observed in biological brains — even when wired in very simple configurations.
Rise of the Insects
According to study lead Dr. Ludovico Minati, insects can rapidly adapt their gait depending on several factors — particularly walking speed. While some gaits are observed frequently and are considered as canonical, in reality a near-infinite number of gaits are available. Different insects such as ants and cockroaches realize similar gaits in very different postures.
The scientists demonstrated their approach with an ant-like hexapod robot. "Perhaps the most exciting moment in the research was when we observed the robot exhibit phenomena and gaits which we neither designed nor expected, and later found out also exist in biological insects," Minati says. "This takes us so much closer to the way biology works.”
Watch for Yourself
Dr. Minati explains what viewers can observe in the video above:
"In the first segment of the video, the system starts off from what in brain science is known as an ‘isoelectric’ condition, meaning total absence of activity. Oscillations gradually build up, increasing in intensity and becoming synchronized. As they do so, a viable walking pattern emerges."
“In the last segment of the video, the local pattern generators are decoupled from the central one, resembling a situation of brain damage as observed, for example, following poisoning by some kinds of insecticides. A series of large-amplitude, cyclic movements are seen, which give rise to thrashing without any effective locomotion, that would eventually lead to paralysis."
The research was recently published in IEEE Access.
