Getting soft robots to move or change shape usually entails injecting air or fluids to activate actuators. A drawback of these set-ups is that they depend on stiff high-pressure pneumatics, which poses an explosion risk.
In developing mobility for soft robots, researchers from École Polytechnique Fédérale de Lausanne (EPFL) 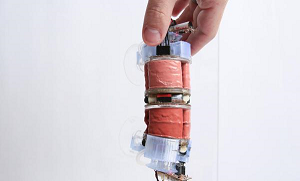 This soft robot is powered entirely by vacuum. Source: EPFLpursued a contrary process: a vacuum that sucks air out of the device’s components. Application of negative pressure causes soft components to collapse — much like when a muscle contracts.
This soft robot is powered entirely by vacuum. Source: EPFLpursued a contrary process: a vacuum that sucks air out of the device’s components. Application of negative pressure causes soft components to collapse — much like when a muscle contracts.
The vacuum-powered robot uses suction to grab objects or adhere to a smooth wall for climbing. It can be reconfigured to perform different tasks, making it highly modular and versatile. Equipped with modular peripheral mechanisms, the plug-and-play system can achieve multimodal locomotion, object manipulation and stiffness tuning.
According to the researchers, a five-module robot can move like a tentacle; a four-module robot with a suction gripper can grab an object and drop it on a target; a three-module robot can crawl on the ground; and a two-module robot can be equipped with suction-cup feet to climb a smooth, vertical surface like glass.
