A team of researchers at Cornell University is using stretchable fiber-optic sensors to develop a soft robot gripper capable of predicting the ripeness of strawberries by touch, and gently twisting them off their branch or vine without incurring any damage.
To train and test this gripper, the team needed a model fruit, selecting the strawberry. This is because strawberries can indicate their ripeness via color. As such, the team trained their model to know the ripeness of strawberries based on touch and then validate the model by looking at the color. Because of this, the team could accurately estimate whether it was the appropriate time to pick strawberries according to the stiffness measured.
 Source: RMIT University
Source: RMIT University
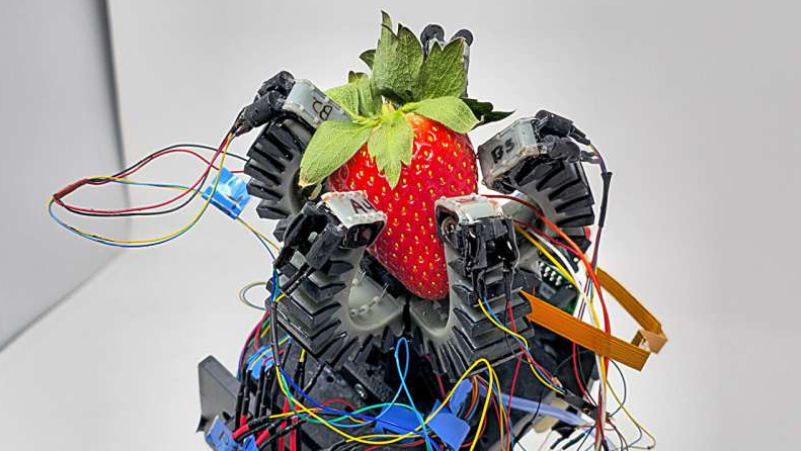
The soft robotic gripper, with an equally soft touch, features two different fiber-optic sensors — one capable of measuring the curvature of the finger, and the other capable of measuring the pressure at the fingertip. Thanks to this design, the robot can estimate the shape of an object and then adjust its grip accordingly to grasp the ripe fruit without bruising it.
"The fiber-optic strain gauges have the same mechanical properties as the grippers that are using them. So it's kind of like the flesh feels the fruit, rather than having separate sensors," the team explained.
Also included in the robot gripper's design is a planetary gear mechanism so that once the fruit is grasped by the gripper, the robot wrist rotates and twists the strawberry off its vine, rather than pulling or plucking it, which can strain and subsequently damage the fruit.
In the event the gripper’s touch isn't enough, the team added a camera in the gripper's palm to locate fruit occluded by leaves or other vegetation.
An article detailing the robotic gripper, “Sensor fusion of touch & vision in soft manipulators for fruit picking,” appears in the journal Nature Communications.
