A team at the Technical University of Munich (TUM) has created a robot prototype capable of detecting and localizing ripe green asparagus, which is thought to be one of the most labor-intensive crops as harvesting it demands extreme precision.
The team explained that because of uneven terrain and stalks of thin and varying lengths, automating the harvesting of asparagus inhibits automation. Particularly, current automation solutions for asparagus picking tend to be too slow and inefficient.
 Source: FAC-PapersOnLine (2025). DOI: 10.1016/j.ifacol.2025.11.822
Source: FAC-PapersOnLine (2025). DOI: 10.1016/j.ifacol.2025.11.822
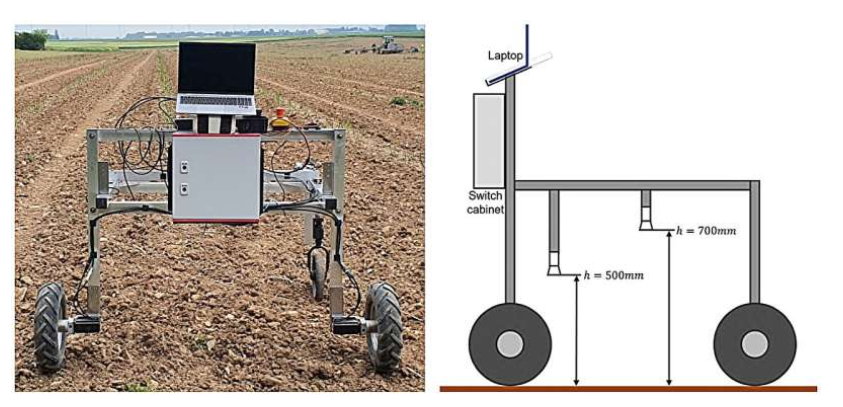
As such, the team created a new system that uses images from cameras mounted on the robot to accurately identify asparagus spears. These images guide the robotic actuator that performs the harvesting. Because the robot is in motion, the system must account for changes in the asparagus’s position relative to the robot between detection and harvesting.
During trials, the prototype was able to identify and localize the asparagus spears thanks to the combination of mounted cameras and the algorithms — all while moving at a commercially attractive speed, which is considered at least 0.33 meters per second.
For now, the prototype can move at up to 0.8 meters per second on uneven terrain and up to 1 meter per second on even terrain. Considering its speed and ability to identify and localize asparagus stalks, the robot exceeds current market standards.
Going forward, the team expects to improve the performance of the detection algorithms through further testing. "When we have further optimized the detection, we will work on the harvesting algorithm and robotic feature," the team concluded.
The study, “Novel Dataset of RGB-D Images for Robotic Harvesting of Green Asparagus,” appears in IFAC-PapersOnLine
