A new robotic system that could potentially be used to perform procedures for treating retinal vein occlusion (RVO) — which is a disease that occurs when a vein in the light-sensitive retina becomes blocked, resulting in a loss of vision — is being developed by a team from Johns Hopkins University.
One promising procedure for the treatment of RVO is retinal vein cannulation (RVC), which is a delicate surgical intervention wherein surgeons insert a tiny needle into the blocked vein and deliver clot-dissolving drugs or medications that slow the abnormal growth of blood vessels.
 Graphical abstract of the autonomous retinal vein cannulation workflow. Source: Adapted from Zhang et al., Science Robotics (2025).
Graphical abstract of the autonomous retinal vein cannulation workflow. Source: Adapted from Zhang et al., Science Robotics (2025).
However, because retinal veins considered for cannulation are similar in thickness to a strand of human hair, precisely inserting a needle manually inside those veins is challenging. As such, the team believes that robots could potentially help surgeons perform RVO procedures by ensuring that needles are inserted correctly and without incurring damage to the patients' retina.
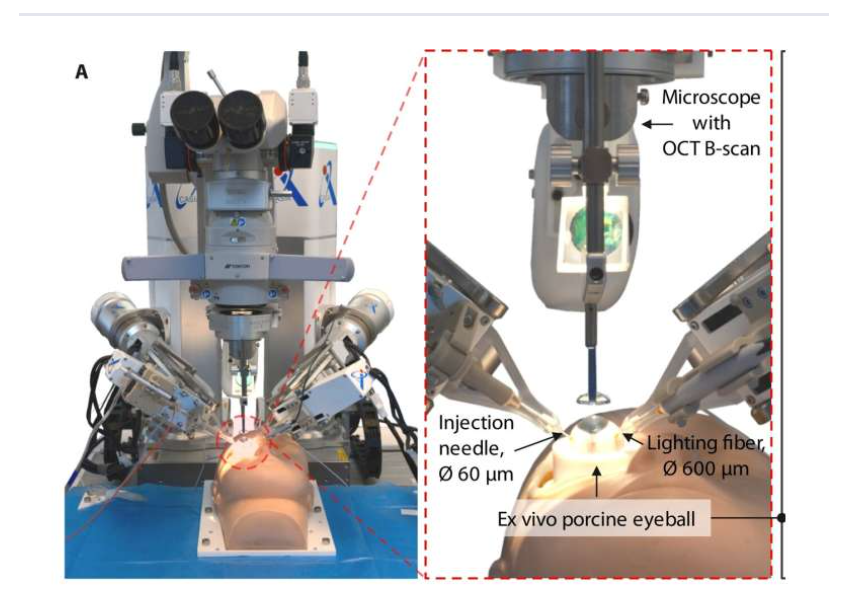
To accomplish this, the Johns Hopkins’ autonomous robotic system uses deep learning to analyze surgical microscope images and optical coherence tomography (OCT) scans of eye tissue to guide its actions.
"This work builds on our long-standing interest in addressing the extreme precision and stability challenges of retinal microsurgery," the researchers explained. "In particular, retinal vein cannulation requires less than 100-micron accuracy, which exceeds normal human physiological limitations. The main objective of this paper was to show that by combining robotic assistance with deep learning, it is possible to achieve an autonomous surgical workflow with a level of precision and repeatability that is difficult to obtain manually."
According to the researchers, the robotic system, which merges computational techniques for controlling robots with high-resolution imaging and deep learning algorithms, is comprised of two robots that perform retinal microsurgeries — called steady-hand eye robots — and hold a tiny needle and a surgical tool.
The team explained that the hardware is paired with three deep learning algorithms trained to track the path of the needle and plan the robot's actions to ensure the correct insertion of the needle into the impacted retinal veins.
The researchers have already tested their system on the eyes of cadaver pigs, successfully completing RVC in 90% of still pig eyes and in 83% of moving eyes. Further, the system could also detect when the needle touched and entered a retinal vein.
An article detailing the system, “Deep learning–based autonomous retinal vein cannulation in ex vivo porcine eyes,” appears in the journal Science Robotics.
