A team of researchers from Pennsylvania State University has developed a tiny, soft, flexible robot that will one day be capable of crawling through earthquake rubble to locate trapped victims or traveling inside the human body to deliver medicine.
To develop such adaptable robots, the team is integrating flexible electronics with magnetically controlled motion.
 Source: Pennsylvania State University
Source: Pennsylvania State University
Although soft robotics — unlike traditional rigid robots — are composed of flexible materials that mimic the movement of living organisms, making them ideal for navigating tight spaces like debris in a disaster zone or the pathways of the human body, integrating sensors and electronics into such flexible systems is challenging.
"The biggest challenge really was to make it smart. For most applications, soft robotics have been a one-way communication system, meaning they rely on external control to navigate through complex environments. Our goal was to integrate smart sensors so these robots could interact with their surroundings and operate with minimal human intervention. We wanted to design a system where soft robotics and flexible electronics work together seamlessly," the researchers explained. "Traditional electronics are rigid, which makes integration difficult. Our solution was to distribute the electronic components in a way that preserves the robot's flexibility while maintaining robust performance."
The team noted that they captured videos of the robots as they crawled and rolled into a ball to move along a course using hard magnetic materials that are embedded in their flexible structure. This enabled the robots to respond predictably to an external magnetic field.
The robot's movements — such as bending, twisting and crawling — can be controlled by adjusting the field's strength and direction, and without onboard power or physical connections such as wires.
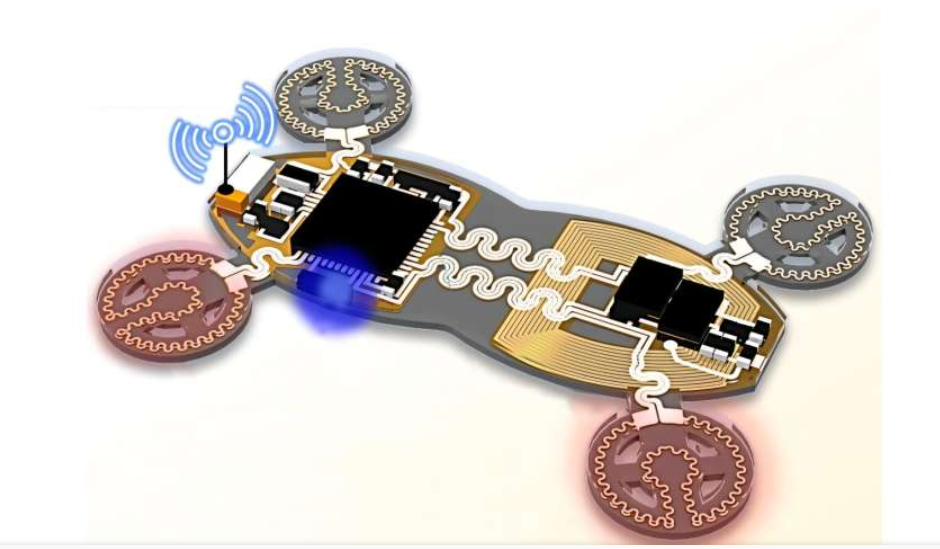
To prevent the flexible electronics, which are still significantly more rigid than soft robotic material, from hindering the robot's movements, the electronics are distributed across the structure, thereby minimizing their impact on movement.
Further, the team sought to block unwanted electrical interference, which comes from outside sources such as other electronics or wireless signals and disrupts how an electronic device or system operates. This interference typically hinders movement and affects sensor performance. As such, the team carefully designed the electronic layout to curtail such interactions, thus ensuring that the sensors were still functional even when encountering strong magnetic fields.
Once the magnetic interference is minimized, the team suggests that the robots could be guided remotely via electromagnetic fields or handheld magnets — thus limiting the human intervention required. Likewise, integrated sensors allow them to respond autonomously to environmental cues. For instance, during search-and-rescue missions, the devices would be smart enough to navigate debris by detecting heat or obstacles, while in medical applications, the devices might respond to pH changes or pressure, thereby ensuring precise drug delivery or accurate sample collection.
"With integrated sensors, these robots could measure pH levels, detect abnormalities and even deliver medication to precise locations inside the body," the researchers explained. "That means fewer invasive surgeries and more targeted treatments, improving patient outcomes. If we can make these robots even smaller, they could be injected into blood vessels to treat cardiovascular diseases or deliver medication directly to affected areas. That would open up entirely new possibilities for non-invasive medical treatments."
An article detailing the new robot, “Wireless, Multifunctional System-Integrated Programmable Soft Robot,” appears in the journal Nano-Micro Letters.
