Researchers from the University of Michigan and the University of Texas created a quiet and energy efficient prosthetic leg prototype with a natural gait. The key to the new prosthetic is small and powerful motors. These motors have been used in robotic arms on the International Space Station.
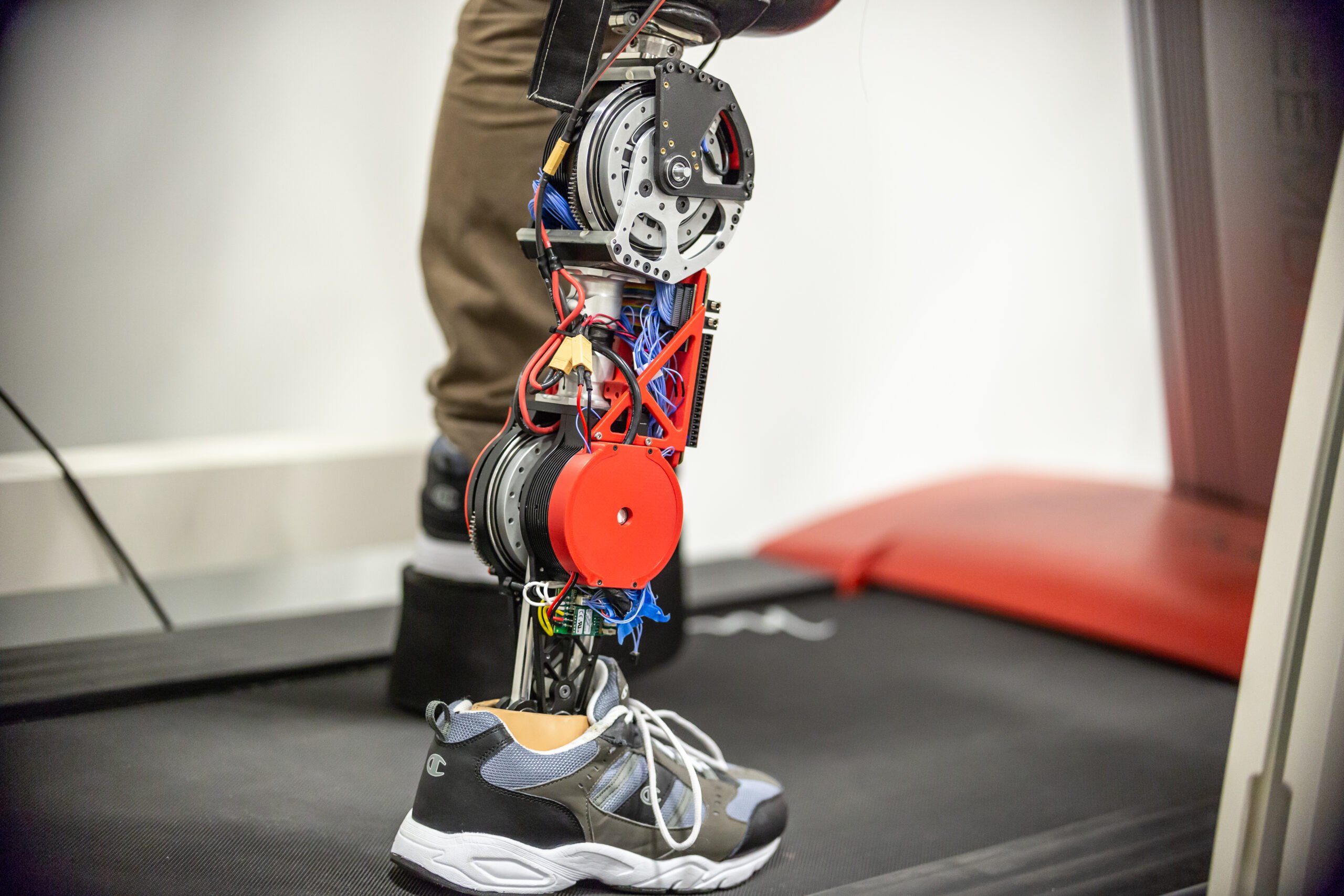 A student tests the robotic leg at the University of Texas at Dallas. The strong motors powering the knee and ankle can propel the user’s body while allowing the knee to swing freely, with regenerative braking to extend battery life. Source: University of Texas at Dallas
A student tests the robotic leg at the University of Texas at Dallas. The strong motors powering the knee and ankle can propel the user’s body while allowing the knee to swing freely, with regenerative braking to extend battery life. Source: University of Texas at Dallas
The new design creates a free-swinging knee and the regenerative braking charges the leg’s battery with energy that is captured when the foot hits the ground.
Conventional prosthetics create an unnatural gait that uses more energy while causing body stress and damaging joints over time. The new robotic leg performs and reacts like human joints to create a natural and free-swinging knee with shock absorption.
The team had to make the motors of the new leg fit in a small space. In the past, this meant using small motors that spin very quickly and a series of gears that convert the fast spin into a power force. But the gears are inefficient and heavy, which makes it difficult for the joint to swing naturally.
Researchers overcame this problem by incorporating two stronger space station motors to power the knee and the ankle and replace the gears. There are many benefits to fewer gears, including enabling a free-swinging knee, lower noise level and the regenerative braking absorbs some of the shock when the foot hits the ground.
Subjects who tested the leg reported being able to feel the leg helping them push off the ground as they walked and it helped their joints.
The team says their next step is to control the algorithms to help the leg automatically adjust to the terrain.
A paper on this research was published in IEEE Transactions on Robotics.
