Researchers from Cornell University have created a soft robot muscle that can regulate the machine’s temperature through sweating. This opens new doors for creating high-powered robots that can operate for long periods of time without overheating.
Creating adaptable and agile robots is difficult because a robot’s internal temperature is hard to regulate. If high torque density motors and exothermic engines overheat, a robot will stop working. This is a big issue for soft robotics. Soft robotics are made of synthetic materials. These materials hold heat and cause a robot to shut down. Adding internal cooling technology, like a fan, is not an option because it adds weight and takes up space.
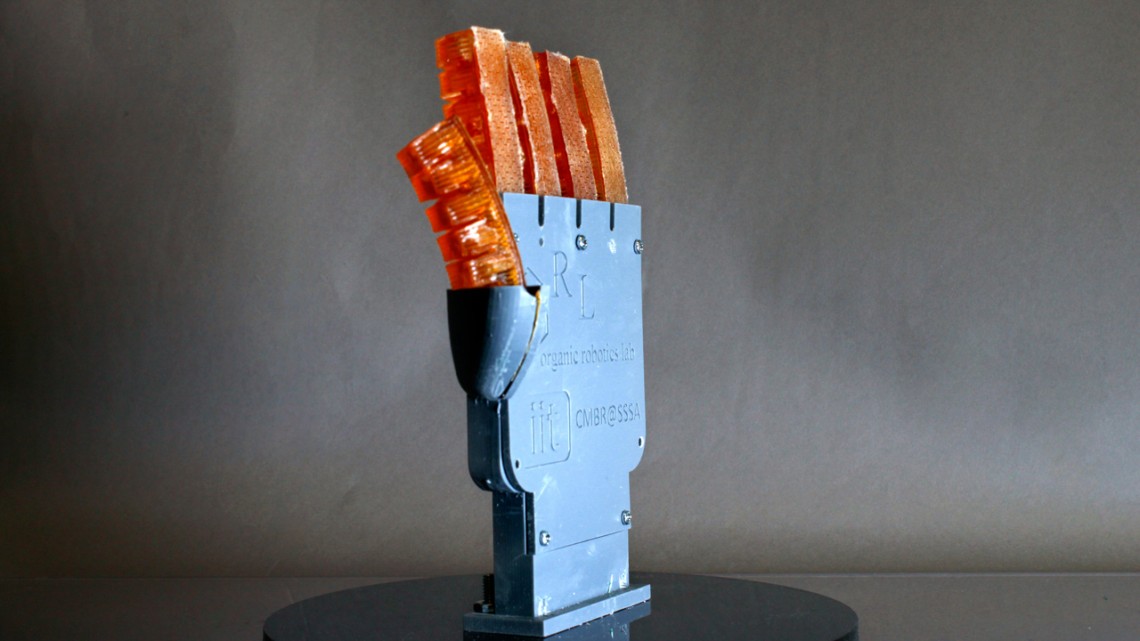 A Cornell team led by Rob Shepherd, associate professor of mechanical and aerospace engineering, made a 3D-printed hand with hydraulically controlled fingers that can cool itself by sweating. Source: Cornell University
A Cornell team led by Rob Shepherd, associate professor of mechanical and aerospace engineering, made a 3D-printed hand with hydraulically controlled fingers that can cool itself by sweating. Source: Cornell University
In humans, sweating rapidly dissipates heat and cools the body below ambient environmental temperature. The team wanted to recreate this phenomenon in soft robots. To do this, the team needed to create a nano polymer material that can sweat. They produced this material using multimaterial stereolithography, a 3D printing technique. Multimaterial stereolithography uses light to cure resign into pre-designed shapes.
The team created finger-like actuators composed of two hydrogel materials that retain water and respond to temperature, creating a smart sponge. The base layer of the smart sponge is made of poly-N-isopropyl acrylamide. This material shrinks when exposed to temperatures above 30° C. The shrinking movement squeezes cooling water up to the top layer of polyacrylamide. The top layer is perforated with micronized pores that are sensitive to temperature and automatically dilate to release sweat. The pores close once the temperature drops below 30° C.
Evaporation of water reduces the actuator’s surface temperature by 21° C within 30 seconds. This is three times more efficient than human self-cooling and six times faster than cooling a robot with a fan. For the system to work, the robot needs to have a way to replenish the water. Researchers say that a solution could enable robots to drink water just like humans.
The system does hinder the robot’s mobility. The team is working on ways to overcome this issue.
A paper on this technology was published in Science Robotics.
