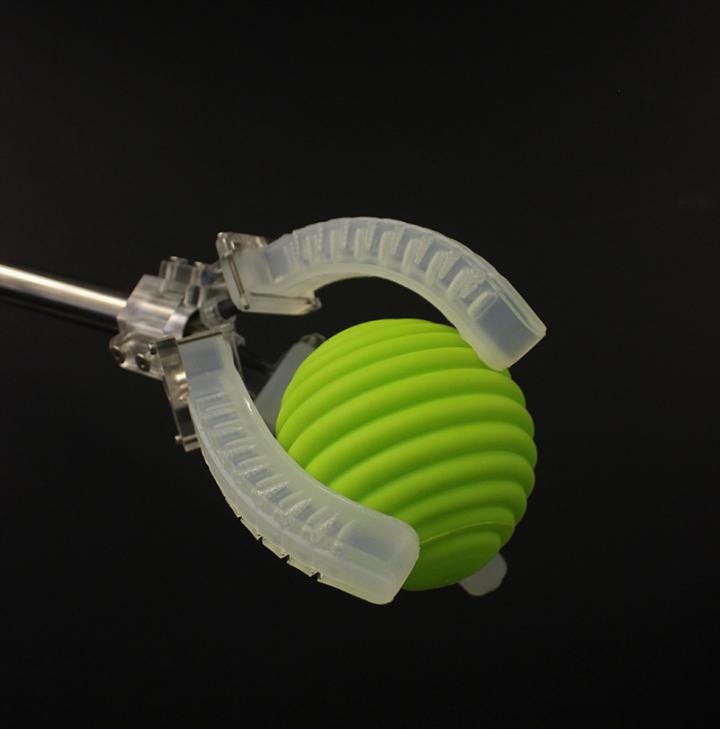
 Gripper Square. Harvard researchers have developed a platform for creating soft robots with embedded sensors that can sense movement, pressure, touch and temperature. (Source: Ryan L. Truby /Harvard University)
Gripper Square. Harvard researchers have developed a platform for creating soft robots with embedded sensors that can sense movement, pressure, touch and temperature. (Source: Ryan L. Truby /Harvard University)
Robots have been developed to fight fires, ski and even sew. One of the only things robots have been unable to do is sense and respond to stimuli. Now, however, researchers from Harvard John A. Paulson School of Engineering and Applied Sciences have developed a platform that allows soft robots to used embedded sensors to sense movement, pressure, touch and temperature.
"Our research represents a foundational advance in soft robotics," said Ryan Truby, first author of the paper on this research and recent Ph.D. graduate at SEAS. "Our manufacturing platform enables complex sensing motifs to be easily integrated into soft robotic systems."
Soft robots have previously been unable to sense touch because the sensors used to enable touch have been rigid. The research team had to create an organic ionic liquid-based, 3D-printed, conductive ink that can be printed right onto soft elastomer matrices that are in most soft robotics.
The researchers created their own 3D-printing technique through the lab of Jennifer Lewis, Hansjorg Wyss Professor of Biologically Inspired Engineering at SEAS and Core Faculty Member of the Wyss Institute. This technique allows for a seamless and quick integration of multiple features and materials within a soft body.
"The function and design flexibility of this method is unparalleled," said Truby. "This new ink combined with our embedded 3D-printing process allows us to combine both soft sensing and actuation in one integrated soft robotic system."
During testing of the soft robotics, the team printed a gripper with three soft fingers with the sensors. They then tested the gripper’s ability to sense inflation pressure, curvature contact and temperature. The embedded contact sensors allow the gripper to sense light and deep touches.
"Soft robotics are typically limited by conventional molding techniques that constrain geometry choices, or, in the case of commercial 3D printing, material selection that hampers design choices," said Robert Wood, the Charles River Professor of Engineering and Applied Sciences at SEAS, Core Faculty Member of the Wyss Institute, and co-author of the paper. "The techniques developed in the Lewis Lab have the opportunity to revolutionize how robots are created - moving away from sequential processes and creating complex and monolithic robots with embedded sensors and actuators."
The next step for this technology is to train the robots to grasp objects of different sizes, shapes, surface texture and temperature.
The paper on this research was published in Advanced Materials.
