Researchers have created a number of different soft robots in the form of an eel, a grip that can feel like human touch, one inspired by origami for healthcare and one that can crawl under debris like a worm.
These robots have one thing in common in that they are soft and feature some sort of external controller. But none of them can go from soft form to rigid.
Now, researchers from Harvard John A. Paulson School of Engineering and Applied Sciences (SEAS) and the Wyss Institute for Biologically Inspired Engineering have created a multi-layered structure that allows robots to mimic an octopus’ kinematics, creating and eliminating joints on command. The structure also allows robots to rapidly change their stiffness, damping and dynamics.
“This research helps bridge the gap between soft robotics and traditional rigid robotics,” said Yashraj Narang, first author of both studies and graduate student at SEAS. “We believe that this class of technology may foster a new generation of machines and structures that cannot simply be classified as soft or rigid.”
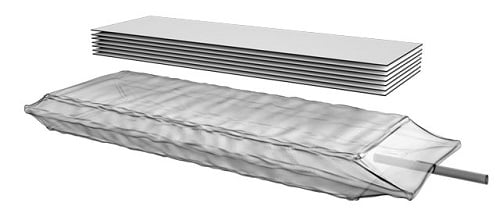 An artist rendering of the soft robotic structure both with and without a vacuum. Source: Harvard University The structure consists of multiple layers of flexible material wrapped in a plastic envelope and connected to a vacuum source. Without the vacuum, the structure bends, twists and flops without holding a shape. But when a vacuum is applied, it becomes stiff and can hold arbitrary shapes and can even be molded into additional forms.
An artist rendering of the soft robotic structure both with and without a vacuum. Source: Harvard University The structure consists of multiple layers of flexible material wrapped in a plastic envelope and connected to a vacuum source. Without the vacuum, the structure bends, twists and flops without holding a shape. But when a vacuum is applied, it becomes stiff and can hold arbitrary shapes and can even be molded into additional forms.
This transition is called laminar jamming, where the application of pressure creates friction that strongly couples a group of flexible materials.
“The frictional forces generated by the pressure act like glue,” Narang said. “We can control the stiffness, damping, kinematics, and dynamics of the structure by changing the number of layers, tuning the pressure applied to it, and adjusting the spacing between multiple stacks of layers.”
The team next built real-world devices using the structures, including a two-fingered gripper that could wrap around and hold onto large objects without a vacuum and could pinch and hold onto small objects about the size of a marble with a vacuum.
The researchers tested the capabilities of the soft robot as shock absorbers by attaching them to a drone as landing gear, then tuned the stiffness and damping of the structures to absorb the impact of landing.
The team believes the robots could be used for anything from surgical robots to wearable devices or flexible speakers.
The full research can be found in the journal Advanced Functional Materials.
