Researchers at the Robotics and AI Lab at the Chinese University of Hong Kong (CUHK), Shenzhen have developed a group of spherical, snail-inspired robots that can collectively solve a physical transport problem by reconfiguring themselves in real time.
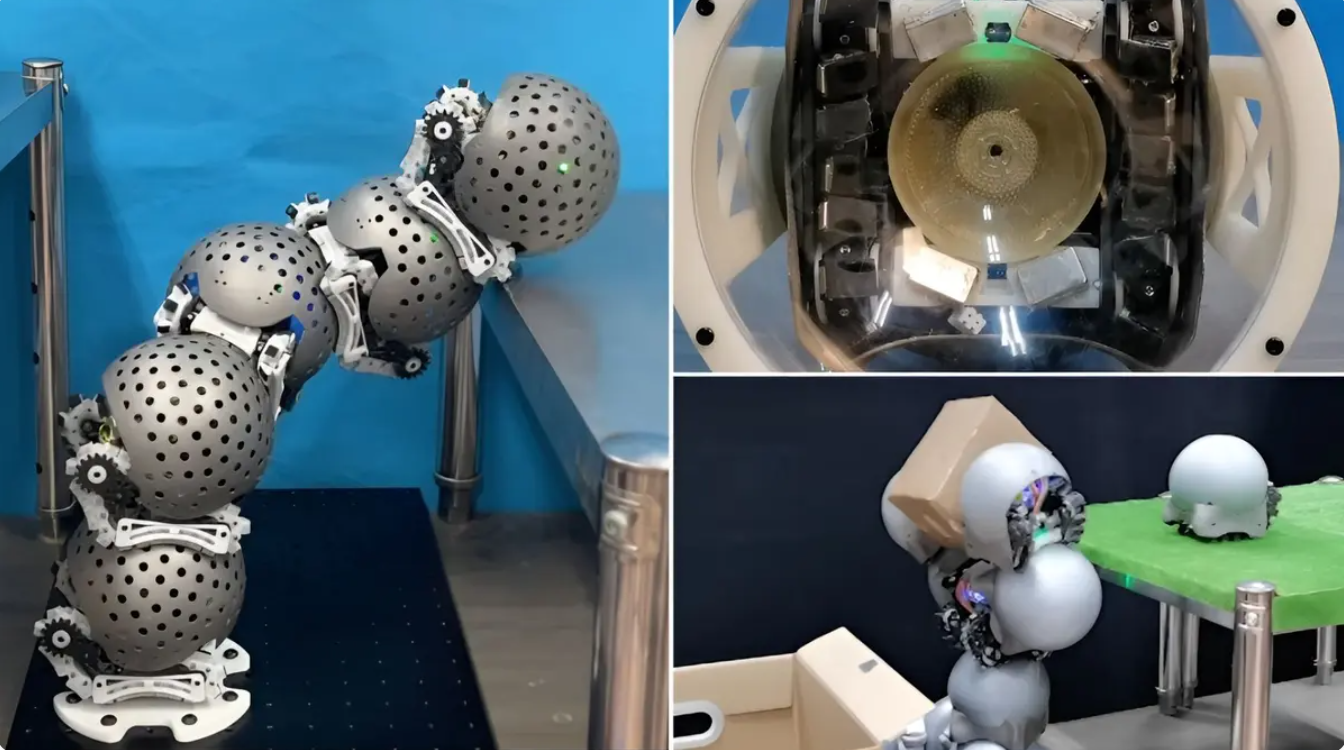
During an experiment, five identical snail-inspired robots worked together to move one unit from a lower platform to a slightly higher platform across a gap, without using ramps, rails or predefined structures. Rather than rely on a fixed mechanism, the robots assembled their own temporary structure. Specifically, four units were stacked vertically to create an inclined column between the two tables.
 Source: Robotics and AI Lab at the Chinese University of Hong Kong (CUHK)
Source: Robotics and AI Lab at the Chinese University of Hong Kong (CUHK)
Once the four robots were stacked, a fifth then climbed onto the stack and adjusted its position as the lower robots shifted to redistribute both weight and steepness. Momentarily, the group behaved as a single articulated body, serving as a living ramp that enabled the robot to reach the higher surface. Once the robots accomplished their task, the structure could be dismantled with each robot returning to independent motion.
The team explained that the system is a 3D terrestrial, self-reconfigurable robotic swarm made up of compact, dome-shaped modules dubbed “snail bots.” Each of these snail bots can operate independently or when physically connected with other robots to overcome obstacles like steps, gaps, trenches and ledges.
The snail-inspired swarm uses a hybrid connection strategy inspired by actual snail behavior, the team explained, with each robot equipped with two distinct connection modes. The first connection mode is described as a free mode that focuses on mobility. This mode relies on a magnet-embedded tracked module that enables the robot to roll forward, rotate in place and create stable connections appropriate for standard movement and quick adaptation, thus reflecting how snails move in real life.
The second mode, dubbed strong mode, focuses on stability and uses a vacuum-based suction mechanism featuring directional polymer stalks to encourage strong adhesion in the event that the swarm needs to support loads, bridge gaps or climb.
Because each mode can be assigned a specific role, the system can easily switch between swift reconfiguration and enhanced structural stability as needed. Physically, each robot features a smooth, matte spherical shell that conceals most of its mechanical complexity. A single tracked module runs along the underside, offering stable traction without exposed arms or protrusions. This design allows the robots to glide past obstacles and establish clean, precise connections during assembly.
For more on the robots, watch the accompanying video that appears courtesy of the Robotics and AI Lab at the Chinese University of Hong Kong (CUHK).
