A team of researchers at Pohang University of Science and Technology and the Agency for Defense Development (ADD)'s AI Autonomy Technology Center in South Korea has built a winged flying squirrel-inspired drone featuring foldable wings.
The team sought to specifically replicate this flying squirrel’s use of its loose flaps of skin, which are attached from their wrists to their ankles, that enable the creature to glide from tree to tree.
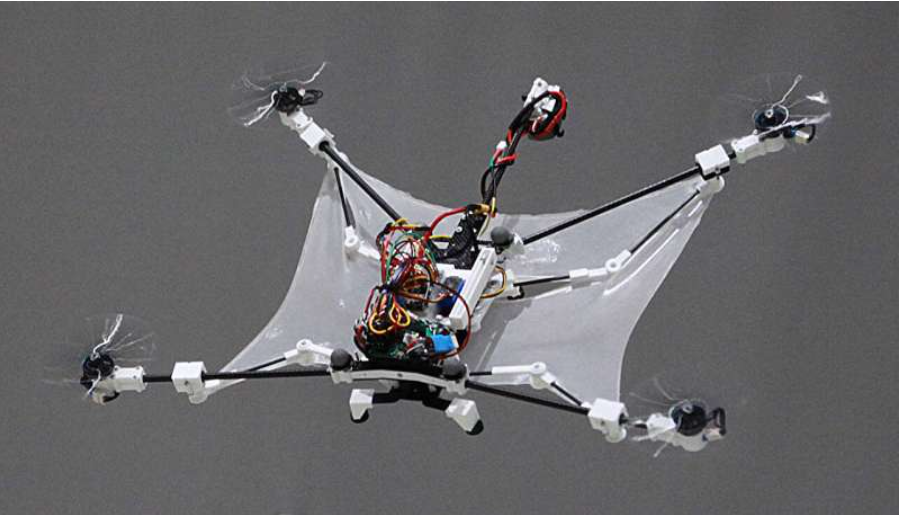 Source: Dohyeon Lee, Jun-Gill Kang and Soohee Han
Source: Dohyeon Lee, Jun-Gill Kang and Soohee Han
"The flying squirrel drone is inspired by the movements of flying squirrels, particularly their ability to rapidly decelerate by spreading their wings just before landing on trees. We initiated this research with the belief that, like flying squirrels, drones could expand their dynamic capabilities by utilizing aerodynamic drag," the researchers explained.
To accomplish this, the team devised a novel drone system that uses deployable wing membranes that enable the drone to execute high-acceleration maneuvers like rapid stops and sharp turns
With earlier designs, the team determined that aerodynamic drag from the robot's wing membrane hindered its performance in typical flight scenarios. Further, in scenarios where the robot is required to stop suddenly or quickly change direction to avoid collisions with obstacles, wing deployment can create a large force in the direction opposite to the object that the drone is attempting to avoid.
"To safely and reliably operate in these scenarios, the flying squirrel drone must be capable of deciding when to deploy or retract its wings based on the situation, and the rotors must be able to generate appropriate thrust accordingly," the researchers noted.
As such, the team trained artificial neural networks to accurately forecast the aerodynamic drag produced by the drone's silicone-based wing membrane. The team then devised a Thrust-Wing Coordination Control (TWCC) strategy that uses those predictions to control both the wing membrane and motors, thus enabling the execution of desired maneuvers.
The team also developed a hardware system that enables the rapid deployment and retraction of the silicone wings, while simultaneously maintaining the form factor of the quadrotor.
"Collectively, we proposed a framework capable of simultaneously controlling the silicone wing membrane — with its complex, non-analytically predictable aerodynamics — and the drone's motors, and the demonstration of high-performance trajectory tracking and obstacle avoidance on real hardware."
Its developers are eyeing the squirrel-inspired drone for future environmental monitoring applications as well as helping with search and rescue missions, capturing footage for movies or carrying out defense operations.
The flying squirrel-inspired drone is detailed in the article, “A highly maneuverable flying squirrel drone with agility-improving foldable wings,” which appears in the journal arXiv.
For more on the flying squirrel-inspired drone, watch the accompanying video, which appears courtesy of Pohang University of Science and Technology.
