Depth perception can be achieved by a variety of 3D sensors ranging from stereo vision with cameras to lidar and time-of-flight sensors, each with its own strengths and weaknesses. While several off-the-shelf options exist, a custom embedded solution can cater to specific application requirements better. The Teledyne FLIR embedded depth perception solution provides a high-resolution color point cloud using custom stereo setup with cameras. Depending on factors such as accuracy, baseline, field-of-view and resolution, such a solution can be built using relatively inexpensive components and open-source software.
 Source: Teledyne FLIR
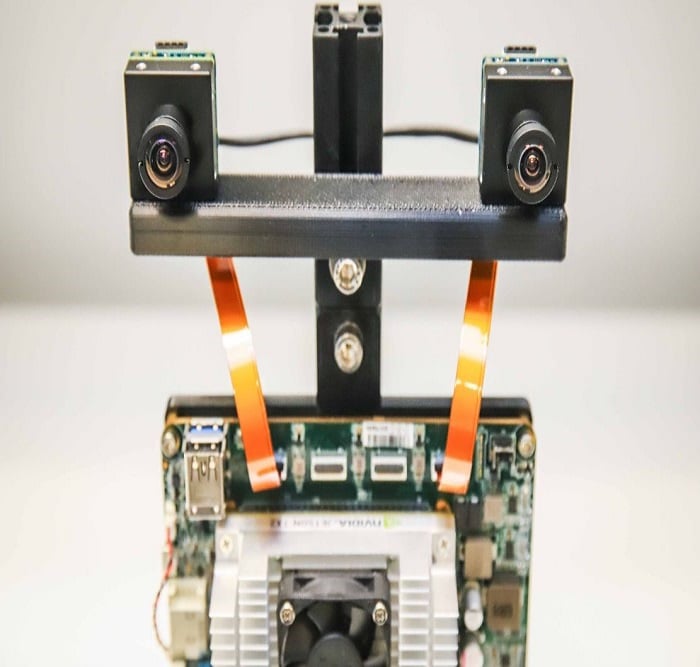
Source: Teledyne FLIR
Machine vision engineers at Teledyne FLIR share an overview of stereo vision while taking the reader through all the necessary steps to design a depth perception solution. The article also covers pros and cons of two design options depending on space and computational requirements: with detailed steps for building, calibration and real-time depth mapping using one of the options. The setup does this without a host computer and uses off-the-shelf hardware and open-source software options. Read along to learn more — the article covers:
• A simplified overview of a stereo vision system
• How machine vision cameras can be used to build a depth perception solution
• Two design options depending on user space and computational requirements
• Step-by-step guide with sample code for building one of the options
• Off-the-shelf hardware and open-source software required to build the system
• Steps for calibration and real time depth mapping
• Unique features, ease of use and integration enabled by Spinnaker SDK
