As processes become more automated, machines will be making many more difficult decisions. Picking machines no longer require precisely-alinged, uniform pieces and an expertly programmed algorithm, thanks to machine vision. Machine vision gives robots the ability to “see” through sets of cameras, then direct a manipulator to pick up objects and move them without dropping them, crashing them into other objects, or picking up the “wrong” object, which may cause the remaining objects to shift.
(Learn more about machine vision on GlobalSpec.)
Opportunities
There are several opportunities where machine vision can be expanded in terms of market reach and application. These opportunities require some imagination, and mean machine vision is more than simply replacing a technician’s eyes, but instead take full advantage of the tasks that a robot can do, and a technician cannot. Automation companies that think in this realm will be able to step ahead of their competitors, who think simply in terms of replacing a technician’s eyes with a robotic camera.
3D imaging
What could be better than using a camera to detect objects? Using multiple, of course. Cameras mounted at different angles can be integrated in software to form a 3D image of the object. Quality control departments can use 3D imaging to find defects in one pass, without having to manipulate the part.
Besides performing full 3D inspections, 3D imaging has potential to turn ideas into prototypes, and prototypes into marketable products faster than ever. In the not-so-far-away future, technicians may scan a prototyped part with a set of precision cameras, known as a 3D scanner. The cameras can generate a computer aided drafting (CAD) model, manipulated in software (perhaps scaled up or down in size), and then manufactured elsewhere in the factory.
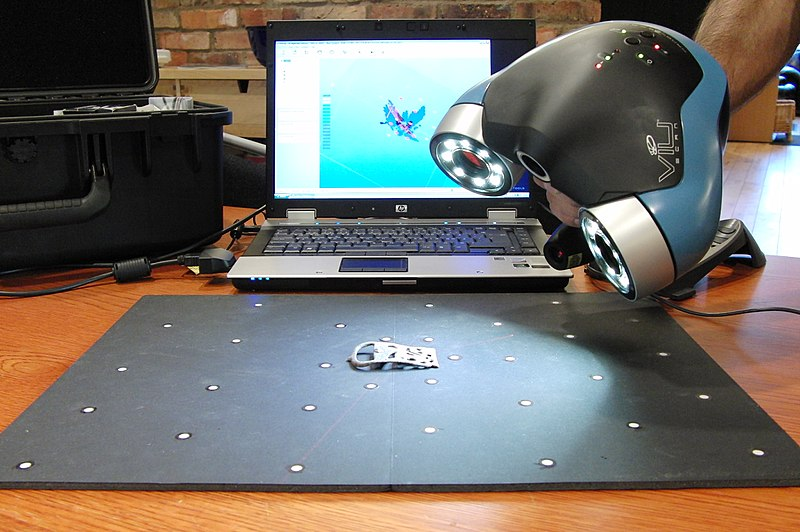 3D scanner developing a CAD model of a part. Source: Creative Tools/CC BY-SA 3.0
3D scanner developing a CAD model of a part. Source: Creative Tools/CC BY-SA 3.0
Spectrum
While the use of cameras to see objects may not sound revolutionary, consider that other parts of the electromagnetic spectrum can be viewed using different cameras. For example, suppose a robot is used to move pre-cooked chicken nuggets from an industrial oven once they are fully cooked. Instead of using a standard camera, which can view the visible light spectrum, perhaps there is a camera that can map the inside of the oven with infrared light. The robot will only move the fully-cooked chicken nuggets, based on their infrared signature, rather than their appearance in visible light.
Infrared cameras in machine vision could also be used by the metallurgical industry, plastics industry and any others where melt and solidification properties must be tightly controlled. Ultraviolet (UV) cameras could be used in conjunction with a UV dye spray to find leaks in seals or cracks in solid parts. This is already practiced in some industries, but it requires manual inspection to find defects. With machine vision, this can be done much more quickly.
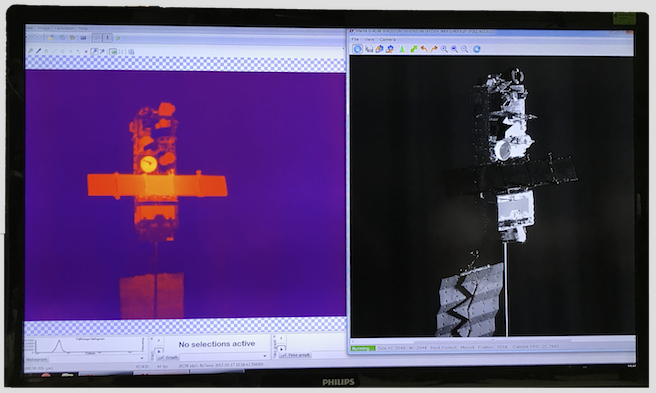 A side-by-side comparison of a model satellite, as shown in infrared and visible light. Source: ESA/CC BY-SA 3.0
A side-by-side comparison of a model satellite, as shown in infrared and visible light. Source: ESA/CC BY-SA 3.0
Smarter Algorithms
One of the major opportunities for robotics and controls manufacturing is in their routing algorithms. It is not enough for machine vision to identify objects of interest; the algorithm must also determine the best route for moving the object safely and efficiently. The race between robotics companies has begun, each of which is developing their own algorithms for tracing the most efficient path.
Challenges
Some of the limitations with machine vision and object manipulation can be overcome with thoughtful engineering. These challenges will initially limit the full potential of machine vision in manufacturing, until new engineering and software solutions have been developed. Automation companies should brainstorm for solutions to these problems.
Oddly-Weighted Objects
Everyone has had the experience of picking up an object, only to find it is more heavy than expected. Item weights can fairly easily be estimated by machines. However, everyone has also had the experience of picking up an object that is weighted unevenly, with a center of mass at one end, or an object that shifts its mass unpredictably. Humans are accustomed to dealing with such objects - children and moving boxes move unexpectedly, shifting their weight or flailing during a temper tantrum. Machine programming struggles to handle this type of unpredictable motion.
Picture a robot that is moving sandbags. The machine vision detects a viable sandbag, and the robotic manipulator picks up a sandbag. As the sandbag is transported, all of the sand rushes to the lowest point in the bag, changing the shape and weight distribution of the bag while in transit. This can cause a collision if, say, the sandbag is now hanging lower in the manipulator than it was when it was initially picked.
Shiny objects
 Highly-polished parts and fixtures can present a challenge to machine vision.
Highly-polished parts and fixtures can present a challenge to machine vision.
The human eye is fooled occasionally, mistaking a reflection for reality. However, the human brain can quickly adjust and recognize subtle details that can distinguish the difference. All of this processing is done automatically, through practice and experience in the early stages of life. Machine vision must be taught how to detect and discard false reflections.
Suppose a picking robot is being programmed to pull polished, stainless steel plumbing fittings. A human could look into the bin, automatically remove the reflections of themselves and the other plumbing fittings, select one, and place it in the proper place. A robot and camera may be fooled by the reflection of itself and the parts reflected in each other. This could be interpreted as a defective part if the reflection is deforme,d or perhaps interpreted as closer or farther away than expected.
Espionage
In previous generations, industrial espionage was a difficult and risky profession. The industrial spy would have to handle the object, take notes, or have near photographic memory to reproduce what they saw in a competitor’s plant. Even still photographs and video only produced a 2D image that had to be expanded to three dimensions for production. However, with the miniturazation of cameras, an industrial spy could sweep over a competitor’s prototype and very quickly have a 3D model, bypassing the research and design, cashing in on the final product.
(See suppliers for machine vision equipment on GlobalSpec.)
Summary
The challenges are not insurmountable, and the leaders in the robotics industry are already tackling these problems. The spoils and opportunities will go to the companies who can address these issues most effectively.
