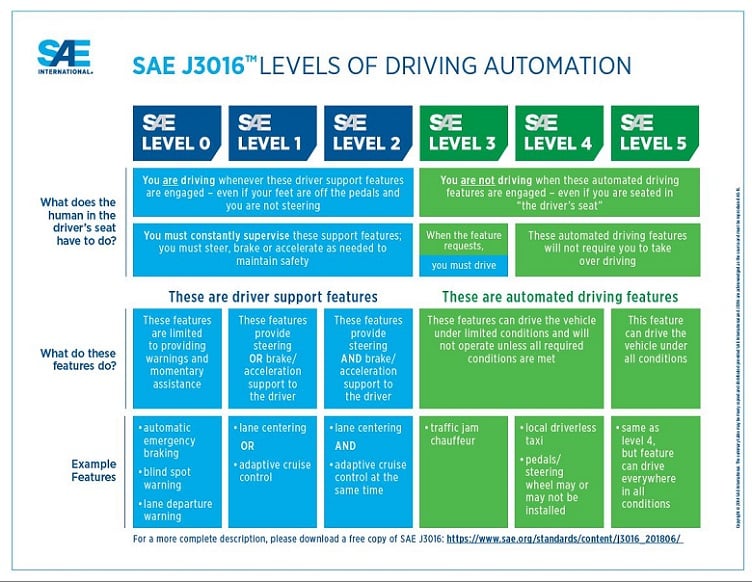
The recently updated SAE J3016 document provides a taxonomy with supporting terms and definitions for SAE’s six levels of driving automation, which range from no driving automation at Level 0 to full driving automation at Level 5. The update refines the previous version of the recommended rractice with the addition of several new terms, substantial refinement and clarification of misinterpreted concepts, and restructuring of certain definitions into more logical groupings.
The revision provides further clarity on the differences between SAE Level 3 and SAE Level 4, including the role of the fallback-ready user, the possibility of some automated fallback at SAE Level 3 and the possibility of some alerts to in-vehicle users at SAE Level 4. Additional terms and definitions are now included for two distinct remote support functions: remote assistance and remote driving, as well as the users who perform those functions: remote assistant and remote driver.
As the technologies enabling the rollout of autonomous self-driving vehicles mature en route to Level 5, fully automated self-driving, redundant fail-safe and fail-operational systems -- particularly advanced driver assistance systems (ADAS) -- are going to be essential in ensuring the safety of all road users. Various sensors are crucial to the efficacy of ADAS, which offers lane departure warnings, automatic emergency braking and pedestrian avoidance. These include automotive imaging, light detection and ranging (lidar), radar, image processing, computer vision, multi-axis inertial motion and in-car networking sensors combined with human-machine interfaces. Each sensor type has its unique benefits and limitations:
- Ultrasonic is good for judging a car’s distance to objects, but only at short ranges.
- Radar can detect objects at long ranges regardless of the weather but has low resolution.
- Lidar has high resolution, but loses sight in heavy snow and rain, and depending on the type, can be costly.
- Cameras, on the other hand, lead the way in classification and texture interpretation. By far the cheapest and most available sensors, cameras unfortunately generate massive amounts of data, and also rely on good visibility.
It is common practice to combine arrays of these sensors to create a detailed digital representation of the vehicle’s environment. However, the individual shortcomings of each sensor type cannot be overcome by merely using the same sensor type multiple times. Instead, it is essential to make judicious use of the sensor data by combining the information coming from the different types of sensors through “sensor fusion” to best interpret the surroundings and, at the same time, ensure the system’s functional redundancy.
[Discover more about the SAE recommended practice covering ADAS for on-road motor vehicles]
