Researchers from the University of Tokyo have created a hybrid aerial-terrestrial quadruped robot that is capable of moving across both land and air.
The robot, dubbed SPIDAR, which is short for Sensing, Processing, and Intelligent Dynamics for Aerial-ground Robot, reportedly features a one-of-a-kind vectorable thrust control system.
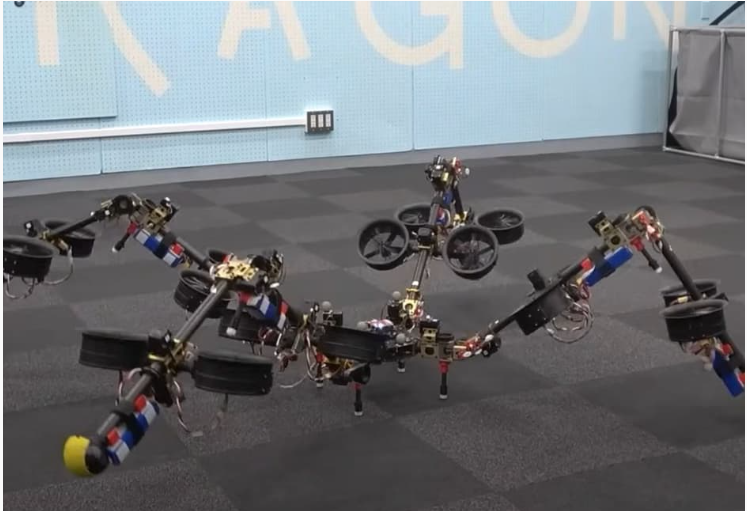 Source: Dragon Labs/YouTubeAccording to its developers, each of the robot’s limbs is outfitted with a vectoring rotor, which enables SPIDAR to alternate between different locomotion modes across air and ground with precision.
Source: Dragon Labs/YouTubeAccording to its developers, each of the robot’s limbs is outfitted with a vectoring rotor, which enables SPIDAR to alternate between different locomotion modes across air and ground with precision.
“The experimental results of the flight with a complex joint motion and the repeatable crawling motion are explained, which demonstrate the feasibility of the proposed thrust control methods for different locomotion modes,” the researchers explained.
The researchers noted that the four legs of SPIDAR are made up of two segments connected by rotating joints. Thanks to its symmetrical construction, SPIDAR moves in any direction. Further, because each leg features a rotor capable of tilting in any direction, SPIDAR can subsequently change the force and direction of airflow to fly or crawl. These rotors also include two counter-rotating propellers designed to prevent undesired spin as well as two motors for tilting.
Using its center of gravity to guide its motion, SPIDAR’s system treats the body as stable by assuming slow joint mobility. Additionally, the system determines how rotor and joint forces move or rotate the robot via physics while a PID controller modifies the angle and force of each rotor to achieve a stable position and orientation.
According to the placement of nearby rotors, SPIDAR limits tilt orientations to prevent airflow interference between rotors. The rotors maintain SPIDAR's weight while crawling and gently raises its legs.
To achieve balance when all legs are off the ground, SPIDAR establishes the optimal ratio of rotor forces to ground contact pressure. Thanks to this hybrid control strategy, SPIDAR can execute both cautious crawling and stable flight, the researchers concluded.
A paper detailing the team’s research, “Vectorable Thrust Control for Multimodal Locomotion of Quadruped Robot SPIDAR,” appears in the journal arXiv.
For more on the team’s findings, watch the accompanying video that appears courtesy of the University of Tokyo’s Dragon Lab.
