Feedback is just what it says in the name — but fast and automatic when it's done right. A system has a set-point, a position/speed or other condition that must be met. When it’s not met, it generates an error signal that instructs a controller to correct the ‘not-met’ condition until the error diminishes to zero.
The cleverest part is in the way the error is processed — so that the response is proportionate and timely. This means — for position — that the system doesn’t race full speed to the set point but slows as it approaches. This can be optimized to mean fast settling (rather than overshoot and correct), optimizing system response and allowing maximum accelerations to be used, for lower travel times overall.
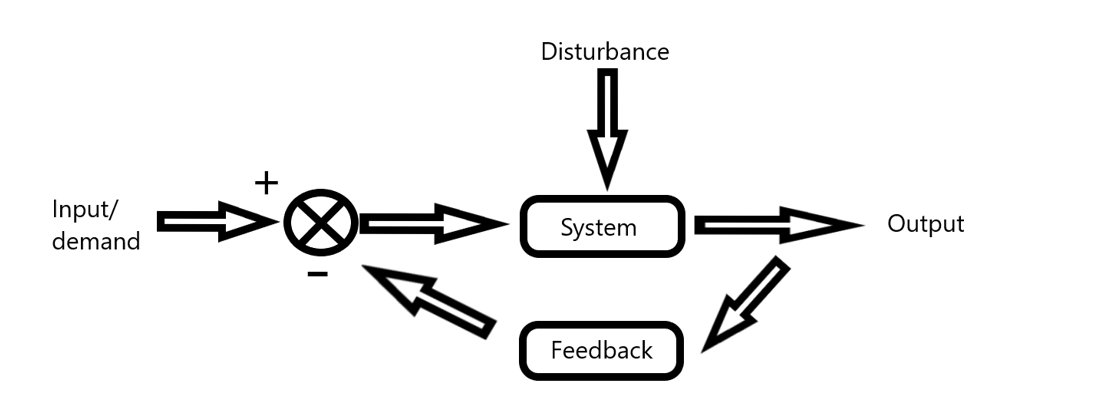 This image shows the control loop schematically, where a command is disturbed, generating an error signal which in turn adjusts the command via a comparator. Source: Custom image
This image shows the control loop schematically, where a command is disturbed, generating an error signal which in turn adjusts the command via a comparator. Source: Custom image
Control system types
Feedback loops are central to regulating motion control systems, ensuring that machines operate with precision, stability of response and optimized speed/acceleration/position/precision according to design inputs.
There are two road forms of control architecture: open-loop and closed-loop.
In open-loop systems, there is no ‘feedback’ mechanism; they operate on a ‘demand met’ basis. A typical example of open loop control is a stepper motor drive, where a number of steps (electrical pulses) are sent to the motor and the system assumes compliance with the command. Where the motor power is more than sufficient to overcome the resistance to motion that the machine presents, most (although typically not all) steps are completed, the motor advances and the motion is completed in the machine.
Where a step is missed, the machine will only become aware of this when a ‘return to zero’ instruction is sent, homing the axis motion to its singular reference point. This will by default reset the counters to a correct zero, after which new step commands can be sent.
This can lead to inaccuracies, since the system lacks the ability to self-correct mid-motion. Where a stepper drive is overtaxed by the force required — such as when cutting becomes momentarily harder, or when an overly demanding acceleration instruction is given errors will accumulate.
How feedback loops regulate motion control systems
Our subject here is closed-loop control, which relies on continuous feedback to adjust performance dynamically, in real-time while in-motion. Sensors play the key role in such systems, providing real-time situational awareness, allowing optimal system performance to be maintained.
The central goal of feedback control in motion systems is to deliver precision, responsiveness and stability. Reducing/eliminating errors by compensating for disturbances allows feedback loops to deliver the desired system response reliably.
In robotics, CNC machines and industrial automation, feedback loops are essential aspects of the maintaining of precision achieving smooth, controlled motion, however complex the system.
Ensuring system accuracy
Feedback loops play a vital role in ensuring system accuracy in motion control by continuously monitoring the output reality and making real-time adjustments to minimize errors in that output. In motion control systems, the goal is to achieve precise movement, whether it's position, velocity or acceleration. However, external disturbances, material inconsistencies or system dynamics can cause deviations from the desired output.
A feedback loop ensures accuracy by comparing the actual output of the system (interpreted by sensors) to the desired input or command signal. If a difference, or error, is detected between the two, the controller adjusts the system to bring it back in line with the desired outcome. This continuous process of monitoring, detecting errors, and correcting them in real-time prevents the system from drifting or accumulating inaccuracies over time.
For instance, in a closed-loop system, feedback mechanisms like PID controllers (Proportional, Integral, Derivative) adjust motor performance by fine-tuning speed, torque or position to match the input specifications precisely. These adjustments help to correct errors caused by variations in load, friction or other mechanical factors.
By maintaining constant feedback and correction, feedback loops ensure that motion control systems perform with high accuracy, achieving the intended outcomes with minimal deviation, even in dynamic or unpredictable environments.
Monitoring output
Sensors that assess reality and convert it to an electrical signal are central to feedback loops by continuously measuring the system's output, such as position, velocity or acceleration. Common sensors used include encoders for position feedback, tachometers for velocity and load cells for force or torque.
Comparison with desired input
The feedback loop compares the real-time data from the sensor(s) with the command input or set-point instructed by the user or programming. This desired input provides the target value for system behavior — position, speed, acceleration or motion profile.
Error detection
The system calculates the real-terms event error, being the difference between the desired input and the actual output. This error signal is mathematically generated using an op-amp or software-based comparator that creates an output signal proportional to the difference between command and reality signals. If the output deviates from the desired target, the feedback loop delivers an error signal to drive correction.
Adjustment through control action
Once an error is generated at the appropriate sensor, the controller processes the information and calculates how much adjustment is required to moderate the error to zero. The controller then sends corrective commands to the actuator, adjusting variables like speed, torque or position to bring the drives error in line with the command.
Continuous iteration
This test-correct-test cycle operates continuously, allowing the system to monitor performance in real-time and adjust, effectively instantaneously. This constant monitor/correction approach ensures precision, minimum overshoot and reliable stability in motion control.
System reliability, balancing speed and accuracy
In enclosed-loop motion systems, balancing operational efficiency and precision is the prime-directive. Where the balance is not struck well, the machine will either move too slowly in positioning motions between precision operations (to achieve higher accuracy on arrival) or it will move too quickly and overshoot more than the optimal amount, requiring settling time.
Real-time adjustments for speed and accuracy
Negative feedback provides real-time monitoring of motion (position, velocity or acceleration), adjusting drive parameters in real-time. This allows the balance-point between speed and accuracy to be a system or user selectable parameter. By this means, the desired performance is delivered without overshooting/correction or sluggish approach.
Minimizing error through proportional control
In feedback systems, proportional control adjusts the system's response in relation to the size of the error. Larger errors result in faster corrective actions, enabling the system to operate quickly while staying accurate. As the error decreases, the response slows down to fine-tune accuracy, ensuring both speed and precision are maintained.
Predictive control to avoid overshoot
The incorporation of PID control feedback predicts the system's behavior based on the rate of change. This prevents overshoot/correction during high-speed operations, by dampening the response before the target is surpassed. The damping ratio is a critical design parameter in the control algorithm.
Adaptive feedback
In dynamic environments with highly varying loads, unplanned loading conditions and potentially significant external disturbances, feedback-control adapts by continuously recalibrating based on real-time performance/condition data, compensating for challenging conditions. This might include increased portage inertia, increased cutter resistance or emergency response needs — particularly in human-interaction and cobot systems.
Feedback in complex motion systems
In highly dynamic environments, where loads, friction or external factors can be highly variable, feedback enables the system to adapt quickly, ensuring reliable performance. This is particularly applicable to systems that involve integration with human actions — people are less predictable than machines and more prone to error-inducing behaviors. Transport systems, for example, must account for maximum loads but operate correctly when under- or over-loaded.
This ability to detect and correct errors or criteria-variations on the fly is essential for preventing drift, minimizing wear and optimizing system response/performance in complex motion control applications like robotics, CNC machining or automated manufacturing.
The future of motion control
Motion control has moved from interesting science to central functionality in all moving systems over the last few decades. The pace of adoption and the spread downwards into lower value and simpler or more rugged applications is evident in all sectors.
The future of motion control will continue to be defined by advances in automation, artificial intelligence (AI), and data-driven technology, enhancing system precision, adaptability and performance across all wide range of industries.
AI and machine learning algorithms are playing an increasing role in optimizing motion control systems by learning from real-time data and predicting system behaviors and, by extension, maintenance-status. The self-correction and independence from human intervention are high-value, but the condition monitoring implications are a huge potential field that is currently rarely exploited.
IoT allows motion control systems to be more interconnected, enabling real-time data exchange and remote monitoring between systems that interact. This is key both to predictive maintenance/condition-monitoring and the high-level balancing of larger, multi-element systems that is implicit in Industry 4.0.
Next-gen motion control can focus on energy efficiency through optimized motor control and the effective application of regenerative power systems to moderate energy consumption in higher power and larger systems.
Future motion control systems will be more intelligent, interconnected and sustainable, ensuring faster, more reliable and efficient operations.
