
Today’s cars today are basically computers on wheels, with each new model containing more electronics and computing power than previous models. In addition to more computing power, automobiles also contain a suite of sensors that give some level of awareness around the vehicle. Of all the sensors being used as part of advanced driver assistance systems (ADAS), radar already plays an important role in tracking other objects within its observation scene, but its role in ADAS is set to evolve beyond this.
Radar is now proposed to be evolved into an imaging tool that can complement vision systems used in vehicles. The idea of using radar for imaging may be counter-intuitive, but it is an important addition to vision systems that must sense depth and velocity of tracked targets. This also provides a viable, safer alternative to lidar systems, yet there is a debate that imaging radar systems cannot scale to the level required to perform their new duties of aiding vision systems. We’ll explore how this new role for radar drives radiofrequency (RF) and digital architecture decisions at the package level and system-level in this article.
Radar’s evolving role
When it was first implemented in automobiles several years ago, radar operating at 24 GHz was used for backup assist and object detection. Together with a camera, the two allowed the driver to detect when the back side of the vehicle was getting too close to another object. It’s a simple implementation of radar + vision, but it makes sense for a few reasons:
- The driver is left to interpret and identify images from the camera.
- The radar’s job is only to sense depth and general direction of a nearby object.
Because there is no target tracking involved, and the driver’s brain is being used to distinguish objects within an image, these radar modules are low compute systems. No image interpolation is needed, and data is streamed to a controller that can implement some basic signal processing to determine target location and heading. The requirements in today’s radars are much greater and go beyond simple object detection.
Today’s requirements for radar modules
As cars are pushed to become more autonomous, so too are the requirements of radar systems being pushed into a new role. Autonomous vehicles will need entire suites of sensors that work together to provide perception for vehicles. Radar is one of those sensor elements, and one proposed system architecture is to use it in a sensor fusion model with other sensors, particularly cameras.
The other option is to scale radar to the point where it can be its own imaging system. Currently, radar does a poor job of generating dense enough velocity-range maps for several reasons:
- Small radar modules have small antenna count, so they do not have high enough resolution for imaging.
- Small antenna count leads to lower total available gain, which limits range.
- The amount of data generated during operation can be very large, which requires a high-bandwidth channel like fiber to transmit data.
 A block diagram of a MIMO radar. Source: AdobeStock Because of these points, newer radar modules are being designed with multiple antenna arrays as multiple-input and multiple-output (MIMO) systems. These systems use high antenna count to create a large virtual antenna array with very high resolution and gain. The idea here is to provide an ultra-high resolution depth map that enables object identification directly from radar scans, or to use a moderate resolution depth map to determine aid object location in conjunction with an imaging system.
A block diagram of a MIMO radar. Source: AdobeStock Because of these points, newer radar modules are being designed with multiple antenna arrays as multiple-input and multiple-output (MIMO) systems. These systems use high antenna count to create a large virtual antenna array with very high resolution and gain. The idea here is to provide an ultra-high resolution depth map that enables object identification directly from radar scans, or to use a moderate resolution depth map to determine aid object location in conjunction with an imaging system.
New radar modules require high compute
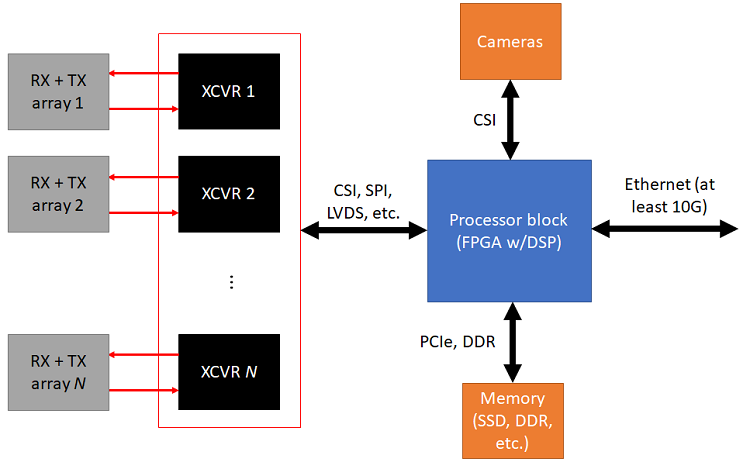
Whether a radar module will stream data from a MIMO array or its data will be used with a vision system to overlay a depth map, these modules need high compute and multiple fast interfaces. A typical block diagram showing the architecture of these systems is shown below, where the system is operating with a field-programmable gate array (FPGA) as the main processor and one or more transceiver/digital signal processing (DSP) blocks as the co-processor.
Typical interfaces found in these systems include:
- Camera serial interface (CSI) for transfer of radar/image data to the host processor
- Low-voltage differential signaling (LVDS) for other streaming data needs
- Multi-gig Ethernet over small form-factor pluggable (SFP)
- Low-speed digital (SPI bus and CAN)
FPGAs have the advantage in this application as there are no SoCs that serve either application area, so everything has to be done custom. FPGA vendors also offer all the IP needed to implement the required interfaces listed above.
[Learn more about radar technologies and equipment suppliers on GlobalSpec.com]
Scalability challenges
Advanced radars using MIMO with artificial intelligence (AI)-based image processing for object recognition and tracking are creative solutions to improving radar functionality. These systems are a step in the right direction toward building perception systems needed for autonomous vehicles. However, it is arguable whether radar systems can scale up to the point of providing the same level of resolution found in imaging systems. The issue is in module size and the amount of data required; antenna arrays can be very large, and even if these are printed on 3D surfaces to increase emitter area, you still have a major scalability challenge.
The more likely solution is some combination of high-resolution MIMO radar with an imaging solution. The radar portion of the design can be used to initially determine a rough depth estimate that aids object identification from an image, followed by high resolution scanning to determine the heading, orientation, and distance from a vehicle during travel. An alternative method of beamforming (e.g., digital beamforming) that provides greater scalability in a small package is also desirable as this will enable high-resolution target tracking for objects identified from rough depth maps.
