Electrically, whether single-phase, two-phase or three-phase, the common AC induction motor appears as a transformer to the applied electrical power. The stator windings, which surround the pole faces of the stationary part of the electric motor, function as the primary of the transformer. The rotor windings can be several lengths of insulated wire wound in a specific pattern around the many pole faces of the rotating member (wire-wound rotor), or a cast of a continuous conductor, such as aluminum, molded around the steel structure (squirrel-cage) of the rotating member (squirrel-cage rotor). These serve as the secondary of the transformer.
Unlike a DC motor, where supply power is applied to both the stationary field circuits through field lead connections and to the rotor windings through the commutator of the armature circuit to generate motor action through opposing electromagnetic fields, the power supply to the rotor circuit in the AC induction motor is induced through transformer action from the revolving electromagnetic field created across the pole faces of the stator structure. Immersed in the center of this revolving electromagnetic field by the mechanical location of the rotor assembly, a secondary voltage is induced in the rotor circuit.
Unlike a transformer, which supplies secondary load impedance, the secondary rotor circuit of an AC induction motor is purposely short-circuited. The voltage induced in the secondary circuit by the revolving electromagnetic field of the stator circuit causes current to flow in the rotor-circuit windings. The flow of rotor-circuit current generates its own electromagnetic field, which opposes (counters) the revolving stator electromagnetic field. The rotor is caused to turn by the opposition of the two electromagnetic fields. The counter-voltage induced in the stator windings by the rotor's rotating electromagnetic fields is the reflected impedance that limits the load current of the stator winding.
Types of three-phase AC motors
Three-phase AC motors can be divided into three general types: squirrel-cage, wound-rotor and synchronous. Only the squirrel-cage rotor motors and the wound-rotor motors are induction motors. The rotor circuit in an induction motor does not have an external power supply. Voltage is induced in the rotor windings by the revolving electromagnetic field created around the inner surface of the stator assembly when power is applied to the stator windings.
A squirrel-cage motor is an asynchronous AC induction motor in which power from the branch-circuit supply is applied only to the stator windings. The power in the squirrel-cage rotor circuit is induced by the rotating electromagnetic field created in the stator circuit (Figure 1). Most AC motors listed as "induction" will be the squirrel-cage type: The rotor bars, molded in a cast of aluminum, have the appearance of a squirrel-cage or the paddle wheel on a steamboat on the squirrel-cage rotor.
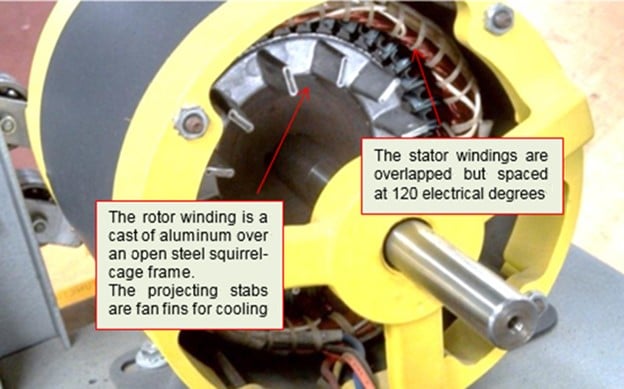 Figure 1: A squirrel-cage rotor induction motor.
Figure 1: A squirrel-cage rotor induction motor.
As compared to a squirrel-cage rotor in which aluminum is cast over a steel rotor frame (the squirrel-cage) in a mold, the armature circuit of a wound-rotor motor consists of preformed wraps of insulated wire (windings) similar to the field windings in the stator assembly of a three-phase AC induction motor. The ends of the windings in the wire-wound rotor are brought out of the motor assembly through slip rings (Figure 2) for connection to variable external resistances (resistive load bank).
Interconnected in a wye configuration on one common end on the rotor assembly, the other ends of the three single-phase windings on the wound-rotor are connected one each to the three slip rings. Through brushes riding on the slip rings, the magnitude of the rotor current can be controlled by a three-phase or "three-leg" wye-connected resistive load bank. Controlling the magnitude of the rotor current with the amount of resistance in series with the respective single-phase rotor windings allows some speed control of the wound-rotor motor, although it is usually used to lower the impact of the starting torque of the induction motor — the individual resistors in the load bank are bypassed or shorted in three or four successive steps until all the resistance is removed from the rotor circuit.
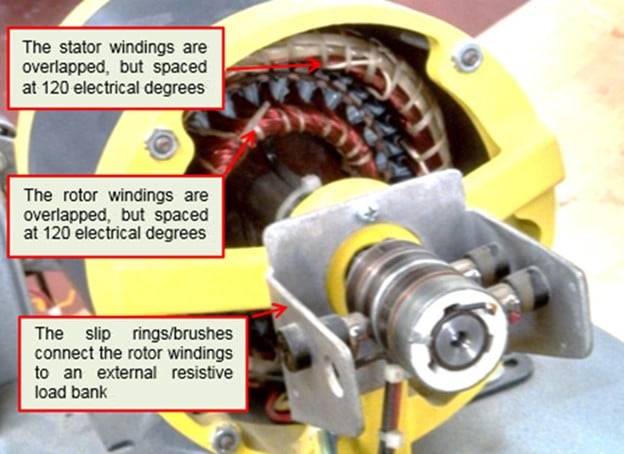 Figure 2: A wound-rotor induction motor.
Figure 2: A wound-rotor induction motor.
A synchronous motor is a special type of AC motor that contains a wire-wound armature rotor assembly in the form of an electromagnet, which can be separately excited by an external DC supply through slip rings on the rotor shaft. The motor is started as a three-phase AC induction motor, and once running, DC is applied to the electromagnet on the rotor assembly. The fixed electromagnetic field of the rotor assembly locks in and rotates in unison or in step (synchronized) with the phase of the alternating current which operates it.
Synchronous motors (Figure 3) are easily recognized by the two slip rings on the rotor shaft. Although started as an induction motor using an amortisseur winding on the rotor assembly, synchronous motors are not induction-type AC motors. The rotor assembly of a synchronous motor consists of an electromagnet. Once started, DC power is applied to the winding of the electromagnet through the two slip ring/brush assemblies. The magnetic poles of the rotor's electromagnet lock-in or with the opposite poles of the stator assembly's rotating magnetic field. The rotor assembly now turns at synchronous speed — at zero slip.
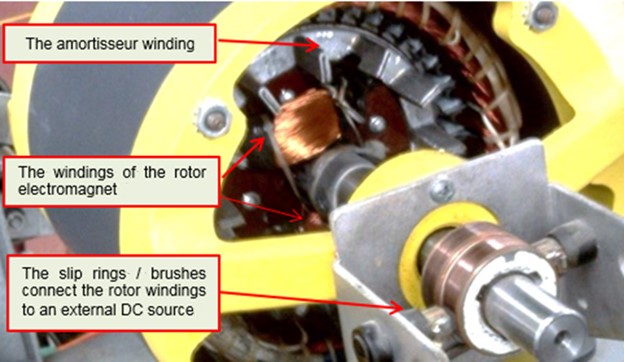 Figure 3: A three-phase AC synchronous motor.
Figure 3: A three-phase AC synchronous motor.
Three-phase AC motor lead identification and connections
The voltage rating of an electric motor for rotary-driven utilization equipment or for a given process usually depends on the voltage rating of the electrical power distribution within the building or other structure where the equipment or process will be located.
The more common three-phase AC building or other-structure electrical-power distribution systems operate at 600 V or less, although large horsepower requirements may warrant electrical-power distribution systems of 2,300 or 4,160 V.
The stator assembly of a three-phase AC induction motor may be wound as either a single-voltage motor or as a dual-voltage motor, in either a delta or wye configuration. The windings in the stator circuit appear as the primary circuit of a transformer to the building electrical-power distribution system. As such, the field leads (the in and out leads of the coil windings within the motor that must be wired in the field) are identified with the capital letter T suffixed with a number. If the motor is rated single voltage, only three field leads will be found in the motor terminal housing: T1, T2 and T3.
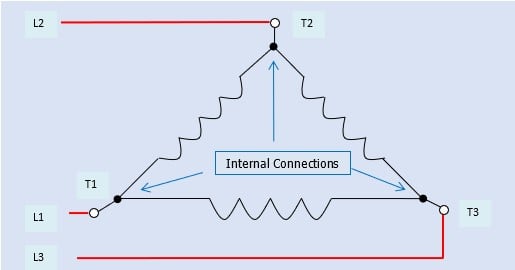 Figure 4: The line supply connections of a delta-configured, single-voltage, three-phase AC induction motor.
Figure 4: The line supply connections of a delta-configured, single-voltage, three-phase AC induction motor.
Each individual three-phase AC induction motor will usually be furnished with a wiring diagram either on the nameplate, on a gummed label found on the underside of the terminal housing cover plate, or in a conspicuous place on the outer surface of the motor housing. As shown in Figures 4 and 5, whether the single-voltage AC motor is wound in the delta or wye configuration will not affect the field wiring connections. Supply lines L1, L2 and L3 extended to the motor controller are merely connected to motor terminal leads T1, T2, and T3, respectively, at or by the controller.
Dual-voltage three-phase AC motor lead identification and delta connections
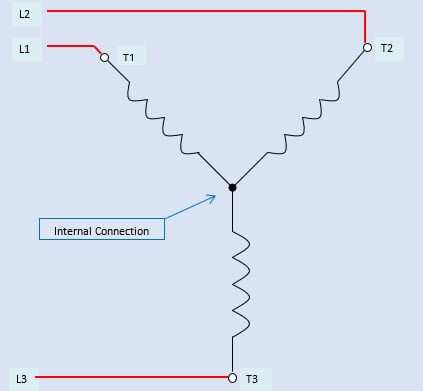 Figure 5: The line supply connections of a wye-configured, single-voltage, 3-phase AC induction motor.
Figure 5: The line supply connections of a wye-configured, single-voltage, 3-phase AC induction motor.
If the stator assembly of the three-phase AC induction motor is wound as dual voltage (the more common is a 230 V rated motor that can operate at either 230 V or 460 V), the electric motor will have a minimum of nine winding leads in the terminal housing. Because the motor windings have some internal connections, how to wire the motor-terminal leads in either a series (for high voltage) or parallel (for low voltage) configuration depends on whether the motor is internally-connected in a delta or wye configuration. For dual-voltage electric motors, the wiring diagram furnished with the motor is very important.
The motor-lead connection diagram in Figure 6 is for a dual-voltage 230/460 V three-phase AC induction motor that is internally wired in a delta configuration. Each phase (or pole pair for each phase) is wired with two 230 V windings: Motor-terminal T1 is the common in-lead [to the internal connection — represented by a bullet (•)] for the two stator windings out-leads motor-terminals T4 and T9. Motor-terminal T2 is the common in-lead for out-leads motor-terminals T5 and T7. Motor-terminal T3 is the common in-lead for out-leads motor-terminals T6 and T8. As with a single-voltage delta-configured 3-phase AC induction motor, common in-lead motor-terminal T1 should be connected to supply line L1, common in-lead motor-terminal T2 should be connected to supply line L2, and common in-lead motor-terminal T3 should be connected to supply line L3. How to interconnect the other six out-leads depends on the operating voltage of the building or other-structure electrical-power distribution supply.
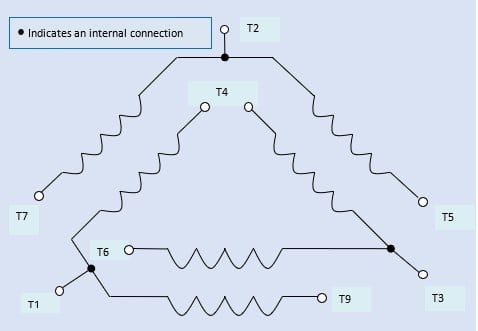 Figure 6: The motor-terminal leads of a dual-voltage delta-configured 3-phase ac induction motor.
Figure 6: The motor-terminal leads of a dual-voltage delta-configured 3-phase ac induction motor.
In a three-phase delta electrical-power distribution system, the three-phase line-to-line voltage and the single-phase motor (alternator or transformer) winding voltages are equal. For 230 V operation, the two 230 V windings drawn in parallel between any two of the three supply line / motor-lead terminals (between L1/T1 and L2/T2, between L1/T1 and L3/T3, and between L2/T2 and L3/T3) in Figure 7 must be connected.
As shown in Figure 7, supply line L1 must be connected common with motor-terminal leads T1, T6 and T7. Supply line L2 must be connected common with motor-terminal leads T2, T4 and T8. Supply line L3 must be connected common with motor-terminal leads T3, T5 and T9. This completes the delta configuration within the 3-phase ac induction motor for 230 V operation. As a memory aid, the three common lines and motor terminal connections create the numbers: 1167, 2248 and 3359.
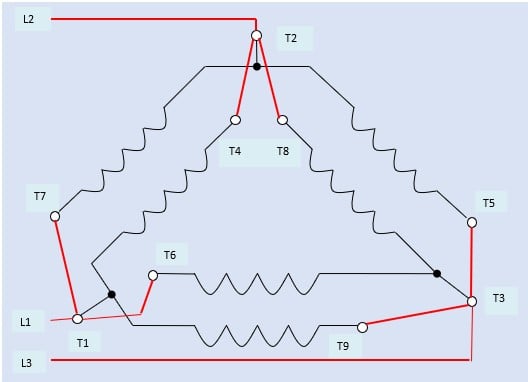 Figure 7: 230-volt operation of a delta-configured dual-voltage 230/460 VAC three-phase AC induction motor.
Figure 7: 230-volt operation of a delta-configured dual-voltage 230/460 VAC three-phase AC induction motor.
Because each winding is rated at 230 volts, wiring the two windings, which are drawn in parallel between any two of the three supply line / motor-lead terminals (between L1/T1 and L2/T2, between L1/T1 and L3/T3, and between L2/T2 and L3/T3) in a series, causes their voltage ratings to add for 460 V operation.
As shown in Figure 8, motor-terminal lead T4 is connected to motor-terminal lead T7 to bridge (interconnect or series-connect) the two 230 V windings drawn in parallel between common motor-terminal leads T1 and T2. Motor-terminal lead T5 is connected to motor-terminal lead T8 to bridge the two 230 V windings drawn in parallel between common motor-terminal leads T2 and T3.
Motor-terminal lead T6 is connected to motor-terminal lead T9 to bridge the two 230 V windings drawn in parallel between common motor-terminal leads T3 and T1. To complete the delta configuration within the motor for 460 V operation, supply line L1 from the motor controller is connected to T1, L2 is connected to T2, and L3 is connected to T3. As a memory aid, the line and common in-lead motor-terminal connections are paired to create the numbers 11, 22 and 33. The out-lead motor-terminal connections are paired to create the numbers 47, 58 and 69.
Dual-voltage three-phase AC motor lead identification/wye connections
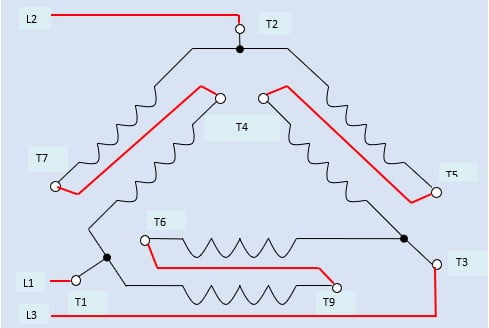 Figure 8: 460-volt operation of a delta-configured dual-voltage 230/460 VAC 3-phase AC induction motor.
Figure 8: 460-volt operation of a delta-configured dual-voltage 230/460 VAC 3-phase AC induction motor.
When a dual-voltage, three-phase AC induction motor is internally wired in a wye configuration, the nine motor leads are identified the same as in the delta configuration: T1 through T9. The internal winding-lead connections are different compared to the delta configuration internal winding-lead connections shown in Figure 6. The winding in-leads of motor-terminals T7, T8 and T9 form a wye of this set of windings with an internal wye connection. The winding identified as motor-terminal lead T1 (in) and motor-terminal lead T4 (out) is wound on the same pole pair as the winding identified as motor-terminal lead T7 (in). The winding identified as motor-terminal lead T2 (in) and motor-terminal lead T5 (out) is wound on the same pole pair as the winding identified as motor-terminal lead T8 (in). The winding identified as motor-terminal lead T3 (in) and motor-terminal lead T6 (out) is wound on the same pole pair as the winding identified as motor-terminal lead T9 (in).
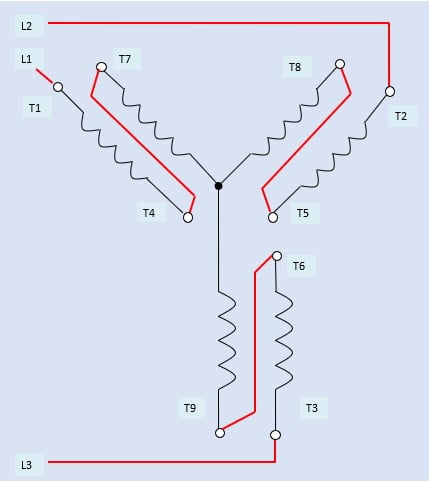 Figure 10: The motor-terminal leads of a dual-voltage wye-configured 3-phase AC induction motor.
Figure 10: The motor-terminal leads of a dual-voltage wye-configured 3-phase AC induction motor.
As with a single-voltage wye-configured 3-phase AC induction motor, motor-terminal in-lead T1 should be connected to supply line L1, motor-terminal in-lead T2 should be connected to supply line L2, and motor-terminal in-lead T3 should be connected to supply line L3. How to interconnect the other six out-leads depends on the operating voltage of the building or other-structure electrical-power distribution supply.
The more common wye-configured, dual-voltage, 3-phase AC induction motor is also rated to operate at either 230 or 460 V. The windings, however, are only rated at 133 volts. In a wye configuration, the 3-phase line-to-line voltage is 173% greater (square root of 3 larger) than the single-phase winding voltage: 230 volts ¸ 1.73 = 133 volts.
As with the delta-configured, dual-voltage, 3-phase AC induction motor, when the wye-configured, dual-voltage, 3-phase AC induction motor operates at the higher 460 V rating, the two respective windings on a given phase must be wired in series. The two 133 V winding voltages will add for 266 V operation. In the higher-voltage wye: 460 V ¸ 1.73 = 266 V. As shown in Figure 10, supply line L1 extended to the motor controller must be connected to motor-terminal in-lead T1; supply line L2 must be connected to motor-terminal in-lead T2, and supply line L3 must be connected to motor-terminal in-lead T3. To complete the 460-volt wye, motor-terminal out-lead T4 must be bridged (interconnected or series-connected) to motor-terminal in-lead T7. Motor-terminal out-lead T5 must be bridged to motor-terminal in-lead T8, and motor-terminal out-lead T6 must be bridged to motor-terminal in-lead T9.
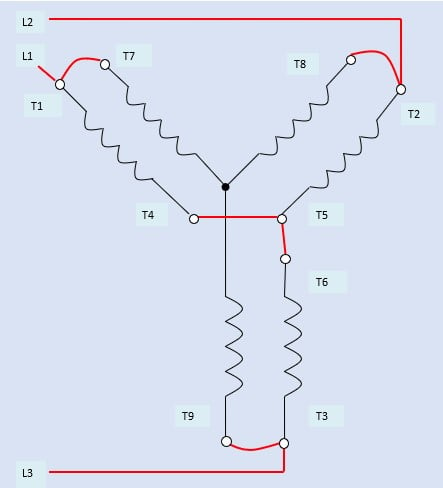 Figure 11: 230-volt operation of a wye-configured dual-voltage 230/460 VAC 3-phase AC induction motor.
Figure 11: 230-volt operation of a wye-configured dual-voltage 230/460 VAC 3-phase AC induction motor.
Looking at the wiring connections in the figures for both the wye (Figure 10) and the delta (Figure 8) high-voltage connections, the wiring connections are the same: L1-T1; L2-T2; L3-T3; T4-T7; T5-T8; T6-T9. These generate the same high-voltage memory aid of 11, 22, 33, 47, 58 and 69.
For low-voltage operation, the wye and delta wiring configurations are different (in terms of wiring connections), although the respective phase windings must be wired in parallel in both wiring configurations.
As shown in Figure 11, out-leads T4, T5, and T6 must be connected common to form the second wye connection. (The common wye out-leads connection for in-leads T7, T8 and T9 was formed at the point of manufacture.) To place the two windings per phase in parallel: Supply line L1 must be connected common with in-leads T1 and T7. Supply line L2 must be connected common with in-leads T2 and T8. Supply line L3 must be connected common with in-leads T3 and T9.
Looking at the wiring connections in the figures for both the wye and the delta (Figure 7) low-voltage connections, and removing the common 4-5-6 connection required of the wye, the wiring connections are similar: L1-T1-T6-T7 in the delta becomes L1-T1-T7 in the wye; L2-T2-T4-T8 in the delta becomes L2-T2-T8 in the wye; L3-T3-T5-T9 in the delta becomes L3-T3-T9 in the wye. These wiring connections generate the low-voltage memory aid of 117, 228, 339, and 456 in the wye configuration.
Some dual-voltage, three-phase AC induction motors are available with twelve leads instead of nine. Usually, a 12-lead motor is required for reduced-torque wye-to-delta starting methods. The motor is started in a wye configuration. By multiple-contact switching, it is transferred into a delta run configuration. Because the run condition is in a delta configuration, the voltage rating of the single-phase windings must be the same as the system line voltage for this type of starting.
The additional three leads, identified as T10, T11, and T12, are the out leads of the internal connections in either the 9-lead wye or delta configuration: In on T7 ― out on T10; in on T8 ― out on T11; and in on T9 ― out on T12. Wiring configurations are the same as presented for the nine lead wiring diagrams; be sure to connect the out leads T10, T11 and T12 as indicated with "internal connections" in these diagrams.
Reversing three-phase AC induction motors
Because an energized three-phase AC induction motor contains a rotating electromagnetic field within its stator housing, and the direction of rotor-assembly rotation depends on the direction of phase rotation of the three single-phase AC sources in the branch-circuit supply to the electric motor, phase reversal of the supply power (interchange of any two of the supply lines) will cause a directional reversal of the rotating electromagnetic field.
Once the motor is wired in either a wye or delta configuration at the correct operating voltage, directional reversing of the rotor assembly occurs with the interchange of any two of the three supply leads, either L1, L2 or L3, with any two of the three field lead connections T1, T2 and T3.
Because the motor supply circuit may be configured as a three-phase AC, three-wire, corner-ground delta electrical-power distribution, supply leads L1 and L3 are typically interchanged with field leads T1 and T3. Supply line L2, because it might be a grounded circuit conductor in the electrical power distribution system of the building or other structure, is left connected to T2 in the reversing of the rotor's direction of rotation.
Because the phase rotation of the three-phase AC supply controls the direction of rotation for the rotating electromagnetic field, a three-phase AC induction motor does not have to be stopped to interchange the reversing connections. Instead, the motor can be reversed "on the fly." In other words, a three-phase AC induction motor is running in a clockwise direction at 1,750 rpm, and with a reversing contactor, L1 is simultaneously disconnected from T1 as L3 is disconnected from T3. An instant later (to avoid short-circuiting the two affected phases, the three-phase AC supply circuit has to be momentarily opened to effect the change); L1 is reconnected to T3 simultaneously as L3 is reconnected to T1. The rotor will be forced to an immediate stop and then started in the opposite counterclockwise direction.
The motor will draw a locked-rotor current (electric-motor locked rotor current is typically six to eight times the motor's full-load current rating) when the rotor stops and commands a reverse run direction. The high-value of lock-rotor/reverse-starting current will subside as the rotor attains 1,750 rpm in the counterclockwise direction.
