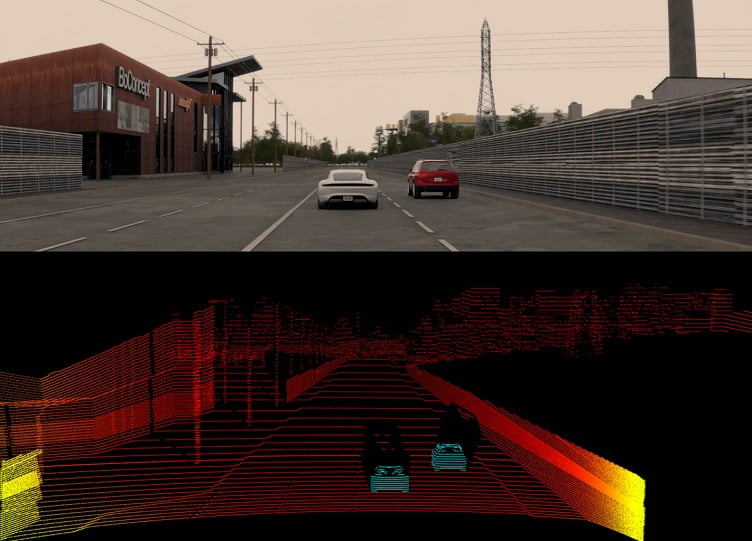
Aeva’s frequency modulated continuous wave (FMCW) 4D lidar sensors are now supported on Nvidia’s Drive Sim platform, a multi-sensor autonomous vehicle simulation system.
The 4D lidar sensors detect 3D positions and the instant velocity of objects at distances up to 500 meters designed to bring an added layer of safety to autonomous driving.
Users of the Drive Sim platform will have access to Aeva’s 4D lidar models to increase simulation capabilities, testing and development. The sensors are designed to work with next generation advanced driver assistance systems (ADAS) and autonomous vehicles
Aeva said the 4D lidar sensors offer perception capabilities not possible with time-of-flight (TOF) 3D lidar sensors, including:
- Instant velocity detection — Which detects velocity at each point as well as 3D position to perceive where things are and how fast they are moving.
- Ultra-long-range performance — For detecting and tracking dynamic objects such as oncoming traffic and other moving objects at 500 meters.
- Ultra-resolution — For real-time, camera-level images at up to 20 times the resolution of TOF lidar sensors.
- Road hazard detection — To detect small objects on roadways.
- Sematic segmentation — For static and dynamic points to enable detection of roadway markings, drivable regions, vegetation and road barriers.
The Nvidia Drive Sim is a platform to run large-scale, physically based autonomous vehicle simulations with multiple sensors involved. The system includes ray-tracing application programming interface allowing developers to create model complex sensor technologies with full control of ray firings and hit point returns.
