An artificial intelligence company that is backed by Tesla Motors’ guru Elon Musk is working to train robot hands to learn to manipulate physical objects with human dexterity. And the robot hand can learn these abilities autonomously.
OpenAI has created a system called Dactyl where a robot hand is trained entirely in simulation and then transfers the knowledge to adapt to real-world physics. Dactyl is a system for manipulating objects using a Shadow Dexterous Hand, where an object such as a block or prism is placed into a robotic hand where it repositions it into a different orientation. The network observes only the coordinates of the fingertips and the images are taken from three regular RGB cameras.
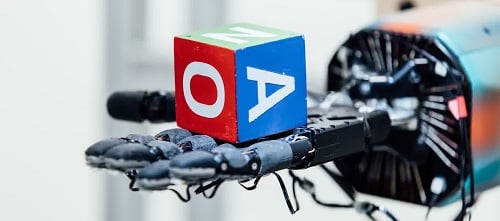 The company taught a robotic hand to reorient objects with 24 degrees of freedom. Source: OpenAIThis reorienting of an object in a robot’s hand solve problems such as high-dimensional control allowing for 24 degrees of freedom compared to seven in a typical robotics hand. Dactyl is designed to be flexible enough to manipulate more than one type of object and can handle noisy and delayed sensors such as when a fingerprint sensor is partially obstructed.
The company taught a robotic hand to reorient objects with 24 degrees of freedom. Source: OpenAIThis reorienting of an object in a robot’s hand solve problems such as high-dimensional control allowing for 24 degrees of freedom compared to seven in a typical robotics hand. Dactyl is designed to be flexible enough to manipulate more than one type of object and can handle noisy and delayed sensors such as when a fingerprint sensor is partially obstructed.
OpenAI said simulated robots can provide enough data to train complex policies but most can’t be modeled accurately enough for those policies to transfer to real robots. Training directly on physical robots allows the policy to learn from real-world physics but still can’t solve a problem such as object reorientation.
Instead, Dactyl’s domain randomization system learns in a simulation which is designed to provide a variety of experiences rather than maximizing realism. This allows for the best of both approaches where experiences can be scaled up quickly and can work on increasingly complex problems to solve a task well beyond the reach of current methods in robotics, OpenAI said.
